


65,199
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
int main(){
char c='x';
while(c!=q){
cin>>c;
cout<<c;
}
cout<<endl;
return ;
}

#include<iostream>
#include <unistd.h>
int main ()
{
std::cout << " world";
write (1, "hello", 5); //write函数不带缓冲
std::cout << std::endl;
}
output:
hello world

#include <Windows.h>
#include <stdio.h>
int main()
{
printf("Start\n");
Sleep(1000);
printf("H");
Sleep(1000 * 10);
printf("\n");
}
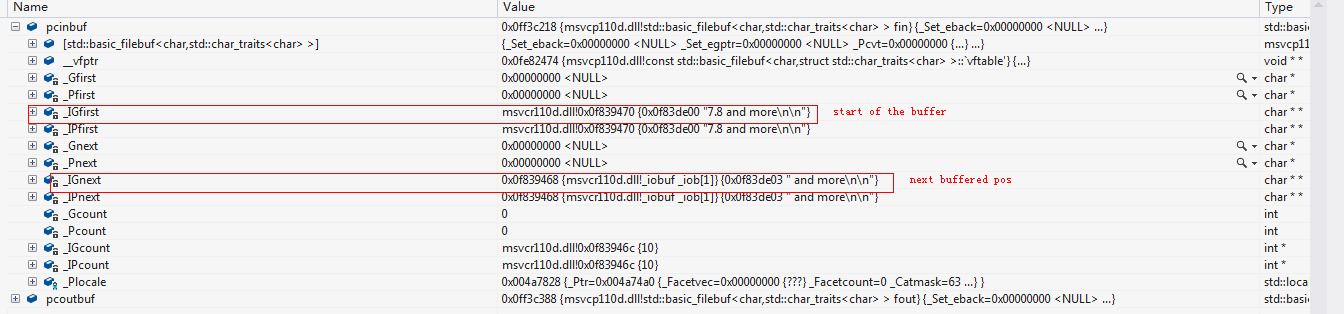
std::streambuf* pcinbuf = std::cin.rdbuf();
double v;
std::cin >> v; //enter: 7.8 and more
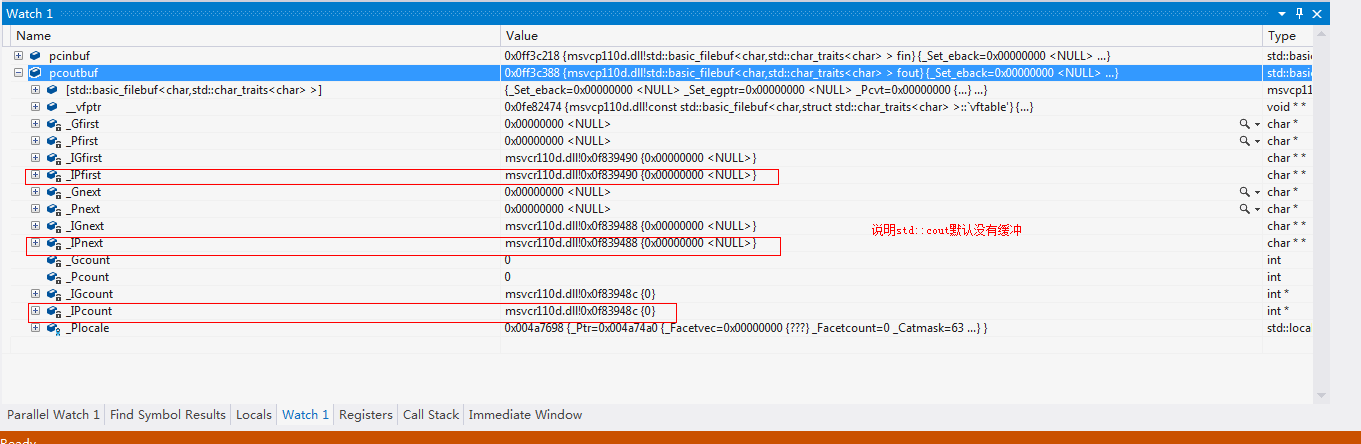
std::streambuf* pcoutbuf = std::cout.rdbuf();
std::cout << "hello";
return 0;

VOID WINAPI ExitProcess(
__in UINT uExitCode
);



