我制作了一个远程控制的工具liveshell,可以随时随地,在网页上、或者安卓、iphone手机上控制家里的路由器。
下载地址:https://github.com/WildDogTeam/liveshell
不仅仅在openwrt上,主流linux平台上都可以使用该工具。
liveshell是和wilddog 云服务配合使用的。
之所以选择这种方式,是因为wilddog云服务有几个主要特点(具体特性的使用可以查阅wilddog.com上的文档):
1.安全性,提供超级秘钥:
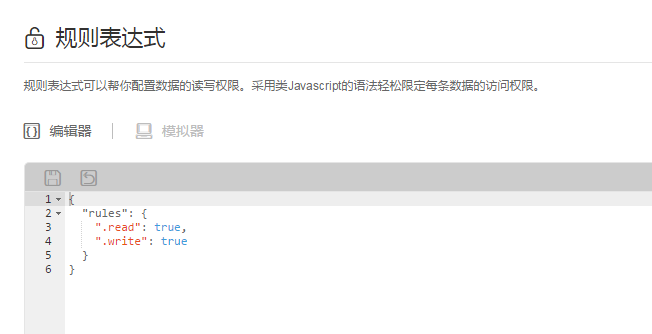
2.灵活性,提供可以配置的规则表达式:
例子:
1.在wilddog.com上注册自己的账号和appid,比如这里我的appid叫做esp
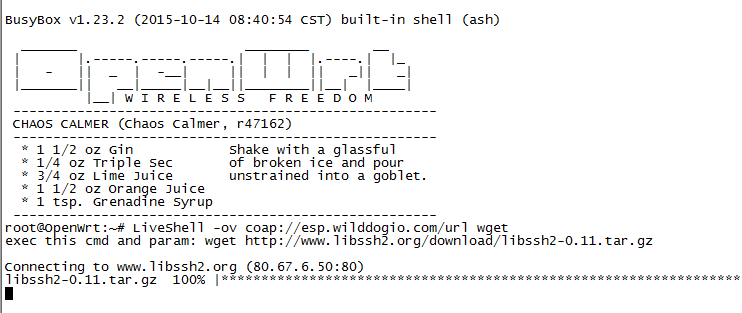
利用liveshell来控制openwrt下载想要的文件:
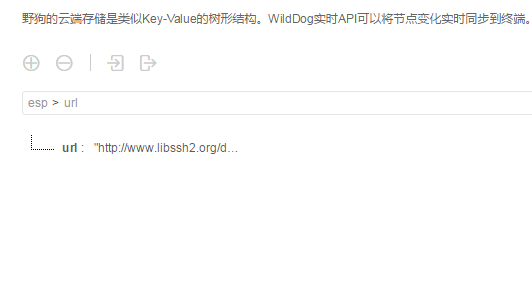
2.在Wilddog云端建立一颗数据树(数据可以自行定义),这里我们用的数据结构为
{
"url": ""
}
3.终端运行liveshell,将<your Appid>替换成你应用的appid
liveshell coaps://<your Appid>.wilddogio.com/url wget
更改"url"的值,如更改为
{
"url": "http://www.libssh2.org/download/libssh2-0.11.tar.gz"
}
那么openwrt就自动从网上下载libssh2到路由器了,当然,还可以指定下载路径,比如
{
"url": "http://www.libssh2.org/download/libssh2-0.11.tar.gz -P ."
}
libssh2就会下载到路由器"."目录下。
4.只要修改云端的url数据,在openwrt下就会继续完成下载工作。
liveshell还支持运行脚本,大家发挥发挥想象力,能做的事太多啦~






 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享