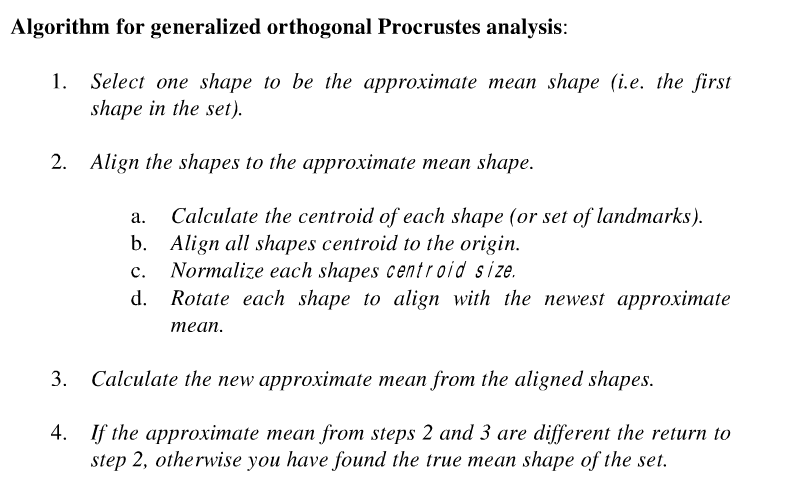
广义普鲁克分析法的算法流程如下图所示:
现在已经有了一些不是很完整的代码,代码头文件如下:[code=c++]struct RotateAndScaleCoefs
{
RotateAndScaleCoefs()
{
s = 1;
theta = 0;
}
RotateAndScaleCoefs(double _s, double _theta) : s(_s), theta(_theta) {}
double s;
double theta;
};
struct TranslationCoefs
{
TranslationCoefs()
{
xt = 0.0;
yt = 0.0;
}
TranslationCoefs(double _xt, double _yt) : xt(_xt), yt(_yt) {}
double xt;
double yt;
};
struct TransformationCoefs
{
TransformationCoefs()
{
a = 1;
b = 0;
}
TransformationCoefs(double _a, double _b) : a(_a), b(_b) {}
double a;
double b;
};
class Procrustes2D
{
public:
static void procrustesAnalysis(QVector<Vector> &vectors, bool scale = true,
double eps = 0, int maxIterations = INT_MAX);
static double getOptimalRotation(Vector &from, Vector &to);
static RotateAndScaleCoefs align(Vector &from, Vector &to);
static void rotateAndScale(Vector &vector, RotateAndScaleCoefs &coefs);
static void transformate(Vector &vector, TransformationCoefs &coefs);
static void translate(Vector &vector, TranslationCoefs &coefs);
static TranslationCoefs centralizedTranslation(Vector &vector);
static void centralize(Vector &vector);
static void centralize(QVector<Vector> &vectors);
static Vector getMeanShape(QVector<Vector> &vectors);
};
[/code]
主代码如下:[code=c++]#include "procrustes.h"
void Procrustes2D::procrustesAnalysis(QVector<Vector> &vectors, bool scale, double eps, int maxIterations)
{
int count = vectors.count();
assert(count > 0);
int len = vectors[0].rows;
assert(len > 0);
assert(len % 2 == 0);
// Translate each vector to the center of origin
centralize(vectors);
// Choose one example as an initial estimate of the mean shape and scale so that |x| = 1.
Vector mean = scale ? vectors[0].normalized() : vectors[0];
Vector oldMean(mean);
double oldDelta = 1e300;
int iteration = 1;
bool end = false;
while (!end)
{
// Align all the shapes with the current estimate of the mean shape.
for (int i = 0; i < count; i++)
{
if (scale)
{
RotateAndScaleCoefs c = align(vectors[i], mean);
rotateAndScale(vectors[i], c);
}
else
{
double theta = getOptimalRotation(vectors[i], mean);
RotateAndScaleCoefs c; c.theta = theta;
rotateAndScale(vectors[i], c);
}
}
// Re-estimate mean from aligned shapes
mean = getMeanShape(vectors);
// Apply constraints on the current estimate of the mean
if (scale)
mean.normalize();
// If not converged, iterate
Vector diff = mean-oldMean;
double delta = diff.sqrMagnitude();
if (delta <= eps || iteration > maxIterations)
end = true;
oldMean = Vector(mean);
oldDelta = delta;
if (iteration % 100 == 0)
qDebug() << " iteration:" << iteration << "; delta:" << delta;
iteration += 1;
}
}
void Procrustes2D::translate(Vector &vector, TranslationCoefs &coefs)
{
int n = vector.rows/2;
for (int i = 0; i < n; i++)
{
vector(i, 0) += coefs.xt;
vector(i+n, 0) += coefs.yt;
}
}
TranslationCoefs Procrustes2D::centralizedTranslation(Vector &vector)
{
double meanx = 0.0;
double meany = 0.0;
int n = vector.rows/2;
for (int i = 0; i < n; i++)
{
meanx += vector(i, 0);
meany += vector(i+n, 0);
}
meanx /= n;
meany /= n;
TranslationCoefs c;
c.xt = -meanx;
c.yt = -meany;
return c;
}
void Procrustes2D::centralize(Vector &vector)
{
TranslationCoefs c = centralizedTranslation(vector);
translate(vector, c);
}
void Procrustes2D::centralize(QVector<Vector> &vectors)
{
int n = vectors.count();
for (int i = 0; i < n; i++)
centralize(vectors[i]);
}
void Procrustes2D::rotateAndScale(Vector &vector, RotateAndScaleCoefs &coefs)
{
double sint = coefs.s * sin(coefs.theta);
double cost = coefs.s * cos(coefs.theta);
int n = vector.rows/2;
for (int i = 0; i < n; i++)
{
double oldx = vector(i, 0);
double oldy = vector(i+n, 0);
double x = cost*oldx - sint*oldy;
double y = sint*oldx + cost*oldy;
vector(i, 0) = x;
vector(i+n, 0) = y;
}
}
void Procrustes2D::transformate(Vector &vector, TransformationCoefs &coefs)
{
int n = vector.rows/2;
for (int i = 0; i < n; i++)
{
double oldx = vector(i, 0);
double oldy = vector(i+n, 0);
double x = coefs.a * oldx + -coefs.b * oldy;
double y = coefs.b * oldx + coefs.a * oldy;
vector(i, 0) = x;
vector(i+n, 0) = y;
}
}
double Procrustes2D::getOptimalRotation(Vector &from, Vector &to)
{
int n = from.rows/2;
double numerator = 0.0;
double denumerator = 0.0;
for (int i = 0; i < n; i++)
{
numerator += (from(i) * to(n+i) - from(n+i) * to(i));
denumerator += (from(i) * to(i) + from(n+i) * to(n+i));
}
return atan(numerator/denumerator);
}
RotateAndScaleCoefs Procrustes2D::align(Vector &from, Vector &to)
{
Vector reference(to);
double referenceScale = 1.0/reference.magnitude();
reference.mul(referenceScale);
Vector vector(from);
double vectorScale = 1.0/vector.magnitude();
vector.mul(vectorScale);
double s = vectorScale/referenceScale;
double theta = getOptimalRotation(vector, reference);
RotateAndScaleCoefs c(s, theta);
return c;
}
Vector Procrustes2D::getMeanShape(QVector<Vector> &vectors)
{
int n = vectors.count();
Vector mean(vectors[0].rows);
for (int i = 0; i < n; i++)
{
mean += vectors[0];
}
mean = mean / ((double)n);
return mean;
}
[/code]
哪位大神能帮忙调试一下程序?




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

