MPU6050运动中断问题
大家好,
MPU9250运动中断唤醒单片机我已经调好了,
但是6050配置寄存器后INT电平一直不变(为高),求助各位大神,怎么解决???
代码如下:
Single_Write(GYRO_ADDRESS,0x6B,0x80); //107
nrf_delay_ms(500);
Single_Write(GYRO_ADDRESS,0x6B,0x00); //107
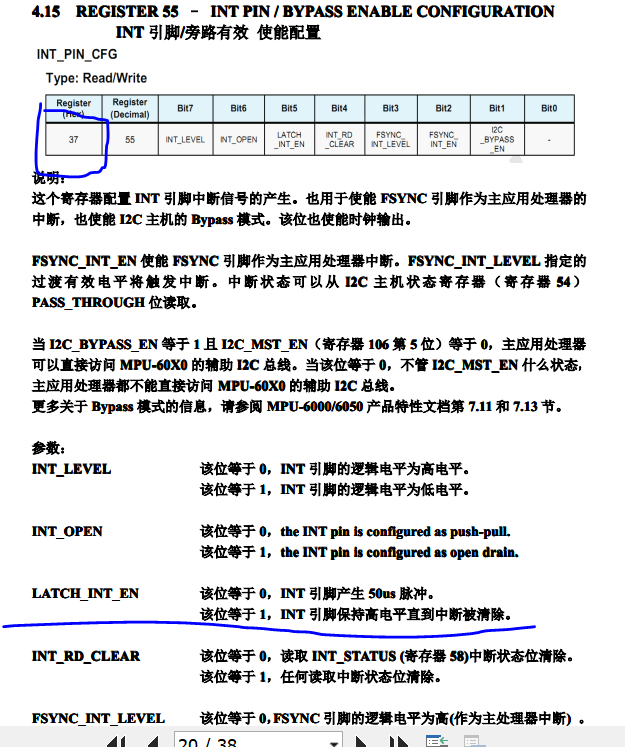
Single_Write(GYRO_ADDRESS,0x6C, 0x07); //¡Ì 108>>>0x37 // INT Pin / Bypass Enable Configuration
nrf_delay_ms(10);
Single_Write(GYRO_ADDRESS,0x1C, 0x00); //¡Ì 28>>>0X1 selects the full scale range
nrf_delay_ms(10);
Single_Write(GYRO_ADDRESS,0x1F, 0x01); //31>> Motion Detection Threshold
nrf_delay_ms(10);
Single_Write(GYRO_ADDRESS,0x38, 0x40); //56>>>Interrupt Enable MOT_EN;
nrf_delay_ms(10);
Single_Write(GYRO_ADDRESS,0x37, 0x80); //55 //HIGH>>>LOW;
nrf_delay_ms(10);
Single_Write(GYRO_ADDRESS,0x69, 0x30); //105>> ??? Motion Detection Control
nrf_delay_ms(10);
Single_Write(GYRO_ADDRESS,0x6B, 0x20); //107>>
nrf_delay_ms(100);


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享


 你可以试试
你可以试试

