社区
单片机/工控
帖子详情
无人机上的GPS与和开源飞控APM之间是如何通信的?
xianzhou3091
2017-10-23 07:30:29
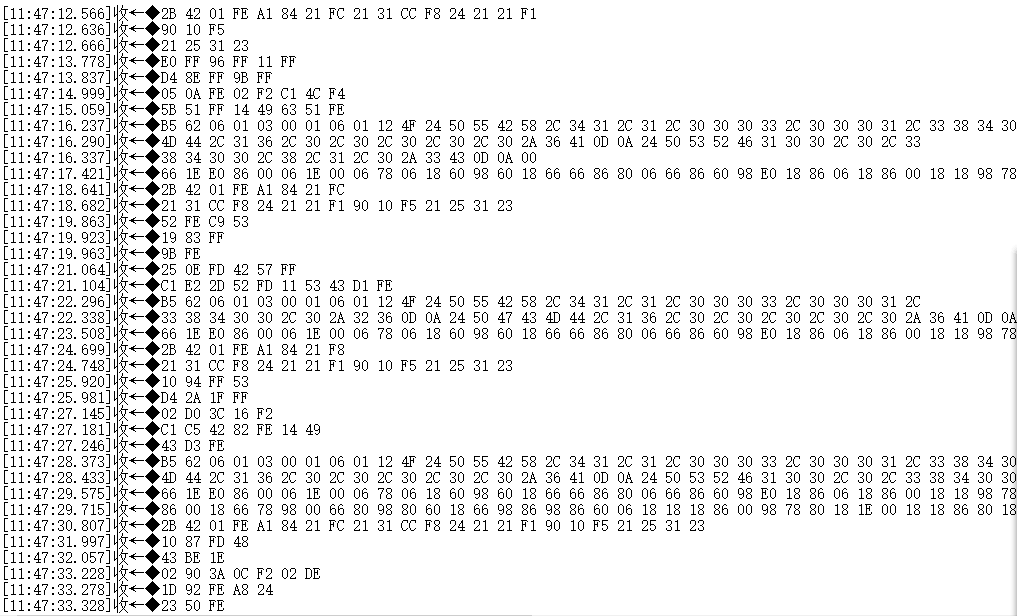
一般是用GPS(U-blox)给AMP飞控定位,我们现在是处于室内的环境下,想要借助NMEA-0183协议自己模拟一个GPS信号让AMP飞控识别。但模拟的信号中只有NMEA-0183语句是不够的,应该还需要类似初始化的语句发送给APM。有没有大神知道APM与GPS之间是如何通信的吗?尤其是细节方面的问题,比如说时序等等
以下是我们用串口助手,从APM的GPS接口收到的数据(部分截图)
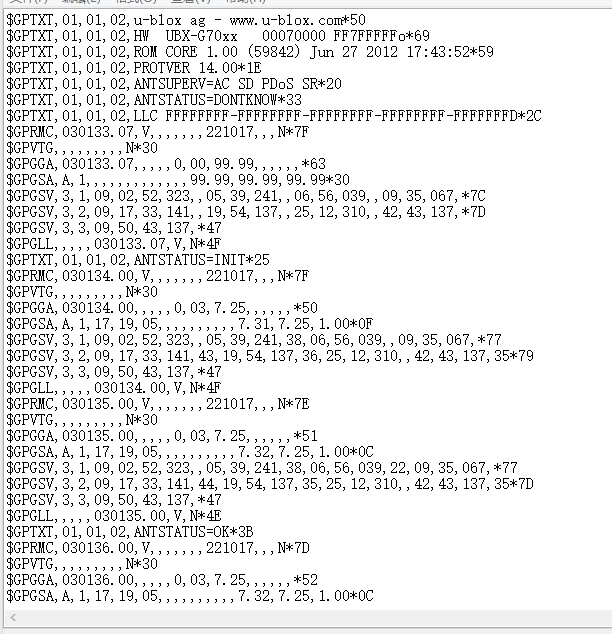
以下是用串口助手,从GPS接口收到的数据(部分截图)
...全文
1027
2
打赏
收藏
无人机上的GPS与和开源飞控APM之间是如何通信的?
一般是用GPS(U-blox)给AMP飞控定位,我们现在是处于室内的环境下,想要借助NMEA-0183协议自己模拟一个GPS信号让AMP飞控识别。但模拟的信号中只有NMEA-0183语句是不够的,应该还需要类似初始化的语句发送给APM。有没有大神知道APM与GPS之间是如何通信的吗?尤其是细节方面的问题,比如说时序等等 以下是我们用串口助手,从APM的GPS接口收到的数据(部分截图) 以下是用串口助手,从GPS接口收到的数据(部分截图)
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
xianzhou3091
2017-10-27
打赏
举报
回复
如果是给APM接上平时用的真正的GPS(比如U-blox的),是完全可以识别的。但我们现在想自己模拟GPS信号从串口送给APM,就要考虑初始化,时序,信号格式,NMEA协议等一些问题。
wsptr
2017-10-25
打赏
举报
回复
APM直接就是从串口收GPS的数据,没有啥特定的格式。你是不是波特率没设置对啊?
Mission Planner最新版本
无人机
开源
地面站,适用于
APM
、PIX、Pixhawk 等
开源
飞控
1.3.80版本号
Mission Planner
开源
地面站,适用于
APM
、PIX、Pixhawk 、TURBO PiX等
开源
飞控
,这是解锁
无人机
的必须软件。适用于window系统。Mission Planner
开源
地面站,适用于
APM
、PIX、Pixhawk 、TURBO PiX等
开源
飞控
,这是解锁
无人机
的必须软件。Mission Planner
开源
地面站,适用于
APM
、PIX、Pixhawk 、TURBO PiX等
开源
飞控
,这是解锁
无人机
的必须软件。Mission Planner
开源
地面站,适用于
APM
、PIX、Pixhawk 、TURBO PiX等
开源
飞控
,这是解锁
无人机
的必须软件。Mission Planner
开源
地面站,适用于
APM
、PIX、Pixhawk 、TURBO PiX等
开源
飞控
,这是解锁
无人机
的必须软件。Mission Planner
开源
地面站,适用于
APM
、PIX、Pixhawk 、TURBO PiX等
开源
飞控
,这是解锁
无人机
的必须软件。Mission Planner(ArduPilot)-1.3.80
【eagle工程文件】
开源
飞控
APM
2.8电路原理图和PCB源文件-电路方案
该设计资料为
APM
开源
的
APM
2.8电路原理图和PCB源文件,用国外一款
开源
软件 Eagle软件打开。
APM
2.8电路板采用二层板设计,凡是对
APM
感兴趣的朋友,可以拿此
开源
飞控
APM
2.8电路图到PCB打样生产。这样成本也会减低很多。
飞控
APM
2.8电路板实物截图: 对于初次使用
APM
飞控
的朋友来说,建议你分步骤完成
APM
的入门使用: 1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能; 2、仅连接USB线学会固件的下载; 3、连接接收机和USB线完成
APM
的遥控校准、加速度校准和罗盘校准; 4、完成各类参数的设定; 5、组装飞机,完成各类安全检查后试飞; 6、PID参数调整; 7、
APM
各类高阶应用
飞控
APM
2.8电路板资料截图,用eagle打开:
APM
apm
原理图 PCB Altium Designer版本资料下载:https://www.cirmall.com/circuit/5508/detail?3
业余折腾吧,
飞控
板
APM
-V2.5全部
开源
,原理图/PCB/源码/中文说明-电路方案
本设计分享的是ArduPilotMega(
APM
)
无人机
飞控
板
APM
-V2.5全部资料,
APM
飞控
系统是国外的一个
开源
飞控
系统,是市面上最强大的基于惯性导航的
开源
自驾仪。附件内容提供
飞控
板
APM
-V2.5全部设计资料,包括硬件、固件源码和中文硬件与软件的快速入门指南。ArduPilotMega
APM
-2.5实物截图:
飞控
板
APM
-V2.5电路 PCB截图: ArduPilotMega
APM
特性包括: 免费
开源
固件,支持飞机("ArduPlane"),多旋翼 (四旋翼, 六旋翼, 八旋翼等), 直升机("ArduCopter")和地面车辆("ArduRover")! 通过点击式的工具简单设置和上传固件。无须编程!(但是你想搞搞代码的话,可以使用简单的嵌入式编程工具: Arduino) 通过点击式的桌面程序完全的规划任务脚本 可以支持上百个三维航点 使用强大的 MAVLink 协议,支持双向遥测和飞行中控制命令T 多种免费地面站,包括 HK GCS, 支持任务规划,空中参数调整,视频显示,语音合成和完整的带回放的数据记录 跨平台。支持Windows, Mac 和 Linux。在 Windows 下使用图形任务规划设置工具 (Mac 下可用模拟器) 或在任何操作系统下使用命令行界面。三种操作系统上都有可用的地面站程序。基于 Arduino 编程环境,也是完全跨系统的。 自动起飞,降落和特殊的动作命令,例如视频和照相控制 完整支持 Xplane 和 Flight Gear 半硬件仿真 包括继电器,可以触发任何设备,可以根据任务脚本控制
STM32F103C8T6开发板+GY521制作Betaflight
飞控
板详细图文教程
前言 前几天改造Skye(Skye刷Betaflight详细图文教程),对Betaflight
开源
飞控
有了一定的了解,产生了自制
飞控
板的念头,网上一番查资料发现可行,现把制作过程记录如下。 1.材料清单 CH340串口下载模块1个(2.5元) STM32F103C8T6黑色开发板1个(11.5元) GY-521加速度计模块1个(3.8元) ams1117-3.3电压转换芯片1个(0.38元) 5V有源蜂鸣器1个(0.43元) 5cm*7cm洞洞板1个(0.45元) 肖特基二极管2个 ss8050三极管2个 1k电阻2个,10k电阻1个 22uf电容1个 还有线
无名科创
开源
飞控
-电路方案
开源
飞控
:支持气压计、超声波定高、户外
GPS
定点、定速巡航,部分视频链接如下: 无名
飞控
暴力测试 无名
飞控
江边定点(长时间) 无名
飞控
定高作死测试 无名
飞控
加速度计6面校准与融合简单讲解 无名
飞控
源码整体框架介绍初步 无名
飞控
解(上)锁与遥控器简单设置 无名科创自研
飞控
平台,经过武汉科技大学连续四届研究生师兄们参考国内外主流
飞控
(
APM
、Pixhawk、Autoquad、MWC、CC3D、无穷开、ANO、Light等)的算法与整体框架的进行深入学习基础上,经过软、硬件的精心设计,继承与发展,目前
飞控
整体功能相对完善,主要功能有:姿态自稳、超声波、气压计定高,户外
GPS
定点,
GPS
模式下定速巡航等功能,涵盖
飞控
学习主要核心算法: 1、四旋翼的传感器滤波(针对传感器不同使用情况:姿态解算、惯导、控制、传感器矫正等)分别采用窗口滑动滤波、不同截止频率的巴特沃斯数字低通滤波器);2、姿态解算(互补滤波、梯度下降法等);3、惯性导航(经典回路反馈法即
APM
三阶段互补滤波,单观测器的卡尔曼滤波,双观测量的卡尔曼滤波,观测传感器延时修正处理等); 4、控制算法(经典PID控制、前馈控制、自抗扰控制ADRC)等。 无名科创团队的发展: 多旋翼飞行器飞行控制系统(简称
飞控
)是我们团队历届主研项目,团队13年即开始第一代
飞控
的研究,从最开始的小四轴,到后来的多旋翼
飞控
,经历N个版本改进,经历无数次断桨、射桨、炸机,一步一步完善与改进,整合除了目前我们这款对外
开源
的
飞控
。团队历来贡献者均就职于
无人机
公司做算法相关工作。目前我们的
飞控
更加完善,更加稳定,更加适合学习,主要核心代码自写率达到百分之90以上,代码基本上是逐行注释,整个
飞控
框架清晰明了,模块化封装规范,方便大家学习与二次开发。由于作者目前仍然在校,主研项目仍为
飞控
,个人时间比较多,可和大家一同交流学习。我们的服务宗旨是:打造国内功能最多、性能最好、成本最低、可玩性最强的
开源
飞控
学习平台。帮助大家以最小的代价、最大的获得感、最快的速度学习
飞控
相关算法,顺利完成进阶逆袭!!! 团队主要成员CSDN
开源
技术博客汇总 ,充分展现我们
开源
共享、共同进步的创客精神,不废话了,直接上图: 部分技术博客截图: 无名科创
开源
飞控
:独家首创10轴IMU组合:MPU6050(加速度计、陀螺仪)+IST8310(DJI同款磁力计)+SPL06-001(歌尔高精度气压计、媲美MS5611),MCU:STM32F103RCT6,这是一款强大的
飞控
,主频72Mhz,flash 256K,板载10 Axis传感器,3轴陀螺,3轴加速度,3轴磁罗盘,高精度气压计。适合新手学习无刷
飞控
,更适合玩家做多种拓展和二次开发,
飞控
预留多个串口,可外接各种附加设备,已实现超声波定高、气压计定高、
GPS
定点等功能,代码完全
开源
。 无名科创
开源
飞控
学习平台: 1、
飞控
板与IMU分离式设计 2、采用3D打印的IMU气压防护罩 3、软件调试支持主流IAR、Keil两款编译器 4、支持多家上位机与地面站,方便调试
单片机/工控
27,375
社区成员
28,769
社区内容
发帖
与我相关
我的任务
单片机/工控
硬件/嵌入开发 单片机/工控
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 单片机/工控
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

