某宝上双目摄像头
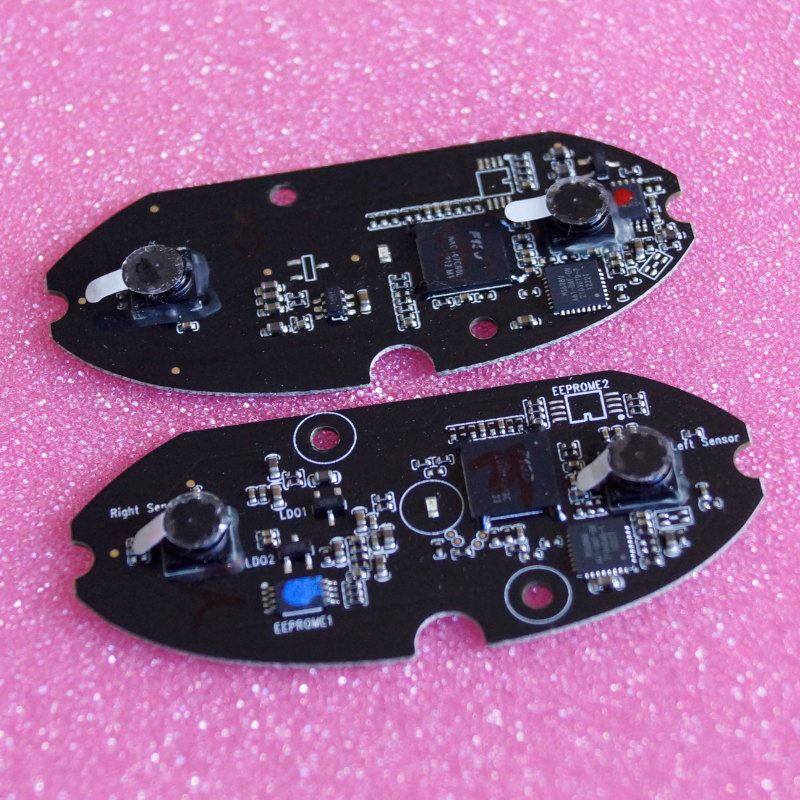
window ubuntu 都能自动识别。
打开摄像头默认左摄像头的图像。
windows使用CHUSEI 3D Webcam可以实现调用左右 红蓝双目图像。
测试

经测试,chusei 3d webcam软件的left、right 、红蓝、双目按钮点击是给usb设备下发了命令。
A_W c376 0001
A_W c376 0002
A_W c376 0003
A_W c376 0004
似乎是往某个寄存器(c376)里写了不同的数值(1234),触发摄像头传相应的图像。
软件配置文件如下
;Device address:
;Format: X_Y ADDR DATA
;X(Source): Sw=SENSOR Word Sb=SENSOR BYTE,E=EEPROM,A=ASIC Md=MCUdata Mc=MCUcode O=OTP
;Y(R/W): R=READ,W=WRITE
A_W c376 0004
如果能写个程序,实现chusei 3d webcam按钮的动作,那么这个双目还是有点利用价值的,特别是ros中的应用。
不知ubuntu 如何与usb摄像头通信。
本人小白,
希望大神指点一二


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享







