您好 请教一下 如何把将一个轨迹函数作为给定目标编写到控制器中?
你好,伺服电机一般内置有角度监测,只需给控制信号即可。 在位置控制模式下,给一定的脉冲,会转到对应的位置; 在速度控制模式下,给一定的脉冲,会以对应的速度转动。 具体控制量的大小和对应的位置/速度可以查看该型号电机的手册。一般伺服电机的PID参数默认即可,如你有特殊需求可以自己调节。 你的图可以作为一个简单的伺服电机闭环控制的系统结构图。
27,374
社区成员
28,770
社区内容
加载中
试试用AI创作助手写篇文章吧
 aiccc 2020-07-13 10:33:00
aiccc 2020-07-13 10:33:00 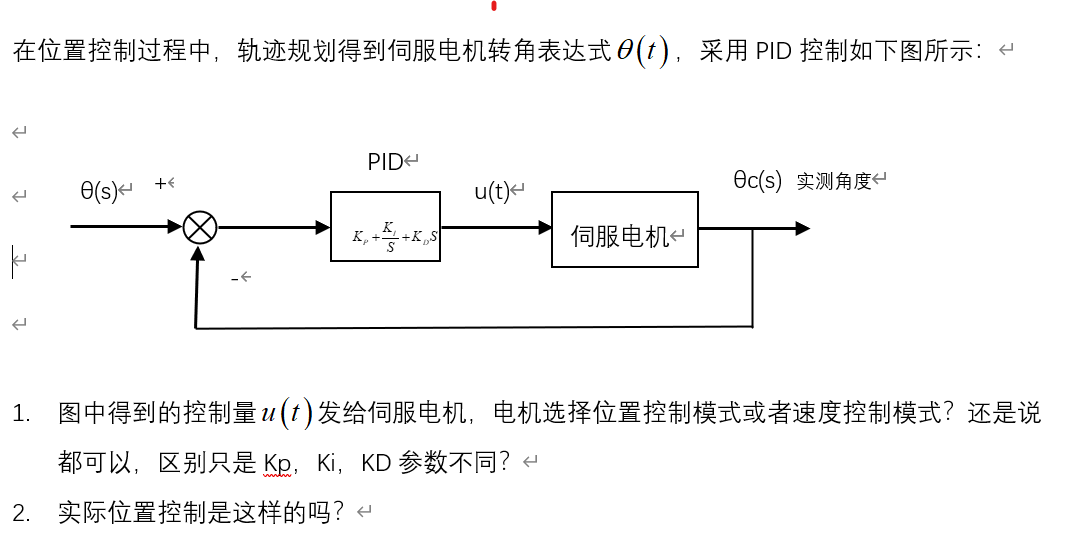




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享