社区
VB基础类
帖子详情
急~三维坐标系变换,请给点思路
zhenxueli
2009-07-04 11:19:45
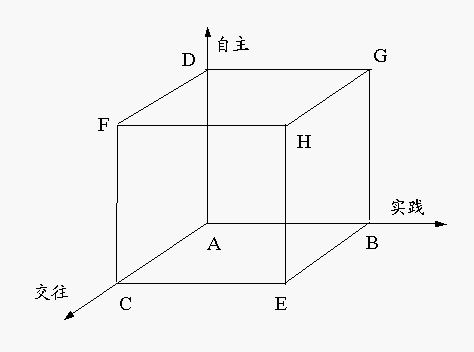
假设以A为原点,实践为X轴,交往为Y轴,自主为Z轴,
现在我想把坐标系进行变换
令三角形BCD的重心为P,将原来的笛卡尔坐标系变换为以P为原点,三角形BCD所在平面为XY轴所在的平面,
即以直线BC为轴,将整个坐标系旋转角度a,在平移,
现在的问题是网上有绕X,Y或Z轴的坐标变换矩阵,可是没有按任意轴旋转的变换矩阵,请大家给个矩阵或解释下怎么推导按对角线BC旋转地矩阵,谢谢~
...全文
809
8
打赏
收藏
急~三维坐标系变换,请给点思路
假设以A为原点,实践为X轴,交往为Y轴,自主为Z轴, 现在我想把坐标系进行变换 令三角形BCD的重心为P,将原来的笛卡尔坐标系变换为以P为原点,三角形BCD所在平面为XY轴所在的平面, 即以直线BC为轴,将整个坐标系旋转角度a,在平移, 现在的问题是网上有绕X,Y或Z轴的坐标变换矩阵,可是没有按任意轴旋转的变换矩阵,请大家给个矩阵或解释下怎么推导按对角线BC旋转地矩阵,谢谢~
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
8 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
hunter206206
2011-11-18
打赏
举报
回复
在搜索里搜 三维坐标变换.ppt 任意坐标变换,我上传了,你看看!
贝隆
2009-07-05
打赏
举报
回复
顶
terrywolf
2009-07-05
打赏
举报
回复
顶一下,没研究过!
zhenxueli
2009-07-05
打赏
举报
回复
谢谢大家,这个问题坛子里有个朋友找到个连接,里面有详细介绍,大家可以看看,通过七步变换实现按任意轴旋转,而我这个问题的旋转轴只要6步即可
http://vip.6to23.com/lqland/100/contents/chapter3/les312.htm
贝隆
2009-07-05
打赏
举报
回复
为了帮楼主,我再顶
zhenxueli
2009-07-05
打赏
举报
回复
刚刚看到一篇相关的介绍,不过还是不怎么懂,不知道大家能不能帮忙看看,找到点思路
任意三维直角坐标系变换矩阵的推导
--------------------------------------------------------------------------------
(v1, v2, v3)坐标系 ==> (u1, u2, u3)坐标系
u1 =a1v1 + a2v2 + a3v3
u2 =a4v1 + a5v2 + a6v3
u3 =a7v1 + a8v2 + a9v3
[ u ] = M [ v ] ------------------------------ 1
现已知一向量w,可分别表达为
w = c1v1 + c2v2 + c3v3 --------------------- 2
w = d1u1 + d2u2 + d3u3 -------------------- 3
由1, 2,3两式得
w = c [ v ] = d [ u ] = d M [v]
==> c = d M --------------------------- 4
公式推导完毕
假设任意坐标系三个坐标轴的分量是 (u, v, w),现要转换成标准的( i , j, k )坐标系
假设u, v, w, i, j, k都是单位向量
将,u, v, w三个向量分别带入 2, 3式可得到9个非常简单的方程组
求解后M的9个元素可得
| ux uy uz |
M = | vx vy vz |
| wx wy wz |
古今多少事
2009-07-05
打赏
举报
回复
新问题……帮帮LZ吧……
zhenxueli
2009-07-04
打赏
举报
回复
ding
MATLAB HGTransform
三维
轨迹动画:从
坐标系
变换
到流畅可视化
在
三维
可视化与仿真中,
坐标系
变换
是实现物体精确运动控制的核心原理。通过定义局部
坐标系
并应用仿射
变换
矩阵,开发者可以高效地管理复杂物体的整体运动,避免了直接操作大量顶
点
的计算负担。这一技术为机器人运动学仿真、无人机轨迹可视化等工程实践提供了稳定基础。其价值在于将图形渲染与运动逻辑解耦,显著提升开发效率与动画性能。应用场景广泛涵盖机械臂路径规划、分子动力学模拟以及飞行器姿态演示。本文聚焦于MATLAB中的HGTransform对象,深入解析如何利用其构建数据驱动的
三维
轨迹动画,并融入性能优化与交互控制等实践技巧
机械臂正运动学-DH参数-Python快速实现
机械臂正运动学-DH参数-Python快速实现 文章目录机械臂正运动学-DH参数-Python快速实现前言:整体
思路
流程:学习资料核心概念:DH参数的理解。DH参数的定义:建立
坐标系
矩阵
变换
公式:最后直接上代码吧: 前言: 最近在玩一个非常弱智的机械臂,好多功能都没有,连个配套的仿真环境都没, 虚拟边界和碰撞检测的功能都非常难用。 没办法,我只能自己实现一个简陋的虚拟边界功能,这必须要在已知关节角的情况下,提前计算出每个关节的
三维
坐标。 这里的问题凝结为输入输出就是: 已知: 机械臂的关节长度,关节构型
矩阵MVP
变换
正交矩阵和透视矩阵
POJ1835~宇航员(
思路
)
宇航员 Time Limit: 2000MS Memory Limit: 30000K Total Submissions: 5997 Accepted: 2618 Description 问题描述: 宇航员在太空中迷失了方向,在他的起始位置现在建立一个虚拟xyz
坐标系
,称为绝对
坐标系
,宇航员正面的方向为x轴正方向,头
二维或
三维
直角坐标中,画出形状不同的含N个格
点
的链
总体
思路
: 1.以第一个节
点
为原
点
,依次向外生长,0、1、2、3、4、5分别代表6个生长方向。如列表[0,2,1,1]表示向左、向前、向右、向右 2.遍历所有情况,然后删去旋转对称的、镜像对称的、节
点
顺序反向的 3.再删去有含重叠节
点
的情况 4.把相对位置转换为绝对坐标,画图 定义旋转和镜像 import itertools from matplotlib import pyplot as plt from matplotlib.pyplot import MultipleLocator import os
VB基础类
7,787
社区成员
197,583
社区内容
发帖
与我相关
我的任务
VB基础类
VB 基础类
复制链接
扫一扫
分享
社区描述
VB 基础类
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享





