社区
Java
帖子详情
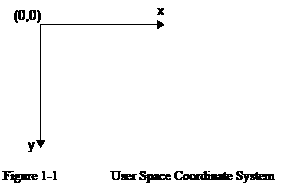
java 窗口中x\y轴方向如何?坐标原点在左上角还是左下角
l594702170
2011-06-09 08:17:34
java 窗口中x\y轴方向如何?坐标原点在左上角还是左下角
...全文
1184
3
打赏
收藏
java 窗口中x\y轴方向如何?坐标原点在左上角还是左下角
java 窗口中x\y轴方向如何?坐标原点在左上角还是左下角
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
3 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
huntor
2011-06-17
打赏
举报
回复
2
程序员的救赎
2011-06-16
打赏
举报
回复
父窗体的左上角为原地,x是横坐标,y是纵坐标,像素为单位
--reply by
CSDN Study V1.0.0.3
(starts_2000)
zqfddqr
2011-06-09
打赏
举报
回复
左上角吧
记得好像是
你试试就知道了
Cocos2d-x学习笔记之世界
坐标
系、本地
坐标
系、opengl
坐标
系、屏幕
坐标
系
cocos2d-x的
坐标
系很重要,想要学好该引擎,深入理解它的
坐标
体系很重要。注释写的很清楚了,对照上运行结果一块来看代码吧! bool HelloWorld::init() { bool bRet = false; do { CC_BREAK_IF(! CCLayer::init()); //opengl的
坐标
系和世界
坐标
系相同,都是以屏幕
左下角
为
原点
,向右为x轴的增加
方向
,向上为
y轴
的增加
方向
//这里的世界指的是游戏世界 //屏幕
坐标
系是以
左上角
为
原点
,是我们熟悉的 //本地
坐标
系也叫节点
坐标
系,世界
坐标
系是相对于整体而言的,而本地
坐标
系是相
相机标定 matlab
matlab 相机标定代码 摄像机标定(Camera calibration)简单来说是从世界
坐标
系换到图像
坐标
系的过程,也就是求最终的投影矩阵的过程。 [1]基本的
坐标
系: 世界
坐标
系; 相机
坐标
系; 成像平面
坐标
系; 像素
坐标
系 [2]一般来说,标定的过程分为两个部分: 第一步是从世界
坐标
系转为相机
坐标
系,这一步是三维点到三维点的转换,包括R,t(相机外参,确定了相机在某个三维空间
中
的位置和朝向)等参数; 第二部是从相机
坐标
系转为成像平面
坐标
系(像素
坐标
系),这一步是三维点到二维点的转换,包括K(相机内参,是对相机物理特性的近似)等参数; 投影矩阵 : P=K [ R | t ] 是一个3×4矩阵,混合了内参和外参而成。 P=K[Rt] 二.基本知识介绍及 1、摄像机模型 Pinhole Camera模型如下图所示: 摄像机模型与标定 - 小企鹅 - 企鹅的博客 是一个小孔成像的模型,其
中
: [1]O点表示camera centre,即相机的
中
心点,也是相机
坐标
系的
中
心点; [2]z轴表示principal axis,即相机的主轴; [3]q点所在的平面表示image plane,即相机的像平面,也就是图片
坐标
系所在的二维平面; [4]O1点表示principal point,即主点,主轴与像平面相交的点; [5]O点到O1点的距离,也就是右边图
中
的f,即相机的焦距; [6]像平面上的x和y
坐标
轴是与相机
坐标
系上的X和Y
坐标
轴互相平行的; [7]相机
坐标
系是以X,Y,Z(大写)三个轴组成的且
原点
在O点,度量值为米(m); [8]像平面
坐标
系是以x,y(小写)两个轴组成的且
原点
在O1点,度量值为米(m); [9]像素
坐标
系一般指图片相对
坐标
系,在这里可以认为和像平面
坐标
系在一个平面上,不过
原点
是在图片的角上,而且度量值为像素的个数(pixel); 2、相机
坐标
系→成像平面
坐标
系 [1]以O点为
原点
建立摄像机
坐标
系。点Q(X,Y,Z)为摄像机
坐标
系空间
中
的一点,该点被光线投影到图像平面上的q(x,y,f)点。 图像平面与光轴z轴垂直,和投影
中
心距离为f (f是相机的焦距)。按照三角比例关系可以得出: x/f = X/Z y/f = Y/Z ,即 x = fX/Z y = fY/Z 以图像平面的
左上角
或
左下角
为
原点
建立
坐标
系。假设像平面
坐标
系
原点
位于图像
左下角
,水平向右为u轴,垂直向上为v轴,均以像素为单位。 以图像平面与光轴的交点O1 为
原点
建立
坐标
系,水平向右为x轴,垂直向上为
y轴
。
原点
O1一般位于图像
中
心处,O1在以像素为单位的图像
坐标
系
中
的
坐标
为(u0, v0)。 像平面
坐标
系和像素
坐标
系虽然在同一个平面上,但是
原点
并不是同一个。 摄像机模型与标定 - 小企鹅 - 企鹅的博客 设每个像素的物理尺寸大小为 dx * dy (mm) ( 由于单个像素点投影在图像平面上是矩形而不是正方形,因此可能dx != dy), 图像平面上某点在成像平面
坐标
系
中
的
坐标
为(x, y),在像素
坐标
系
中
的
坐标
为(u, v),则二者满足如下关系:[即(x, y)→(u, v)] u = x / dx + u0 v = y / dy + v0 用齐次
坐标
与矩阵形式表示为: 摄像机模型与标定 - 小企鹅 - 企鹅的博客 将等式两边都乘以点Q(X,Y,Z)
坐标
中
的Z可得: 摄像机模型与标定 - 小企鹅 - 企鹅的博客 将摄像机
坐标
系
中
的(1)式代入上式可得: 则右边第一个矩阵和第二个矩阵的乘积亦为摄像机的内参数矩阵(单位为像素),相乘后可得: (2) 和(1)式相比,此内参数矩阵
中
f/dx, f/dy, cx/dx+u0, cy/dy+v0 的单位均为像素。令内参数矩阵为K,则上式可写成: 摄像机模型与标定 - 小企鹅 - 企鹅的博客 (3) 三.相机内参K(与棋盘所在空间的3D几何相关) 在计算机视觉
中
,摄像机内参数矩阵 其
中
f 为摄像机的焦距,单位一般是mm;dx,dy 为像元尺寸;u0,v0 为图像
中
心。 fx = f/dx, fy = f/dy,分别称为x轴和
y轴
上的归一化焦距. 为更好的理解,举个实例: 现以NiKon D700相机为例进行求解其内参数矩阵: 就算大家身边没有这款相机也无所谓,可以在网上百度一下,很方便的就知道其一些参数—— 焦距 f = 35mm 最高分辨率:4256×2832 传感器尺寸:36.0×23.9 mm 根据以上定义可以有: u0= 4256/2 = 2128 v0= 2832/2 = 1416 dx = 36.0/4256 dy = 23.9/2832 fx = f/dx = 4137.8 fy = f/dy = 4147.3 分辨率可以从显示分辨率与图像分辨率两个
方向
来分类。 [1]显示分辨率(屏幕分辨率)是屏幕图像的精密度,是指显示器所能显示的像素有多少。由于屏幕上的点、线和面都是由像素组成的, 显示器可显示的像素越多,画面就越精细,同样的屏幕区域内能显示的信息也越多,所以分辨率是个非常重要的性能指标之一。 可以把整个图像想象成是一个大型的棋盘,而分辨率的表示方式就是所有经线和纬线交叉点的数目。 显示分辨率一定的情况下,显示屏越小图像越清晰,反之,显示屏大小固定时,显示分辨率越高图像越清晰。 [2]图像分辨率则是单位英寸
中
所包含的像素点数,其定义更趋近于分辨率本身的定义。 四.畸变参数(与点集如何畸变的2D几何相关。) 采用理想针孔模型,由于通过针孔的光线少,摄像机曝光太慢,在实际使用
中
均采用透镜,可以使图像生成迅速,但代价是引入了畸变。 有两种畸变对投影图像影响较大: 径向畸变和切向畸变。 1、径向畸变 对某些透镜,光线在远离透镜
中
心的地方比靠近
中
心的地方更加弯曲,产生“筒形”或“鱼眼”现象,称为径向畸变。 一般来讲,成像仪
中
心的径向畸变为0,越向边缘移动,畸变越严重。不过径向畸变可以通过下面的泰勒级数展开式来校正: xcorrected = x(1+k1r2+k2r4+k3r6) ycorrected = y(1+k1r2+k2r4+k3r6) 这里(x, y)是畸变点在成像仪上的原始位置,r为该点距离成像仪
中
心的距离,(xcorrected ,ycorrected )是校正后的新位置。 对于一般的摄像机校正,通常使用泰勒级数
中
的前两项k1和k2就够了;对畸变很大的摄像机,比如鱼眼透镜,可以使用第三径向畸变项k3 2、切向畸变 当成像仪被粘贴在摄像机的时候,会存在一定的误差,使得图像平面和透镜不完全平行,从而产生切向畸变。也就是说,如果一个矩形被投影到成像仪上时, 可能会变成一个梯形。切向畸变可以通过如下公式来校正: xcorrected = x + [ 2p1y + p2 (r2 + 2x2) ] ycorrected = y + [ 2p2x + p1 (r2 + 2y2) ] 这里(x, y)是畸变点在成像仪上的原始位置,r为该点距离成像仪
中
心的距离,(xcorrected ,ycorrected )是校正后的新位置。 五.摄像机的外参数 旋转向量(大小为1×3的矢量或旋转矩阵3×3)和平移向量(tx,ty,tz)。 旋转向量:旋转向量是旋转矩阵紧凑的变现形式,旋转向量为1×3的行矢量。 r就是旋转向量,旋转向量的
方向
是旋转轴 ,旋转向量的模为围绕旋转轴旋转的角度。 通过上面的公式,我们就可以求解出旋转矩阵R。同样的已知旋转矩阵,我们也可以通过下面的公式求解得到旋转向量: 。
暴力解构PowerBI大赛作品
本课程分析和学习PowerBI大赛优秀作品当
中
的亮点和优点功能,主要讲解这些亮点功能如何实现目前主要内容有以下,未来持续更新1 制作
中
文日期粒度切片器2 制作预警卡片和提示信息3 设置查询条件进入查询和遮罩层的实现4 同时动态设置X轴
Y轴
及双筛选控制
Y轴
5 实现灵活的指标对比6 探索矩阵更丰富的样式7 二叉树和弹出窗效果8 页面导航器和书签导航器9 诱导性阅读导航按钮设计10 多次跳转页导航11 按钮超链接到其他PBI报表12 探索矩阵更丰富的样式213 折线图上突出阴影区域14 折线图上高亮显示指定线段15 资产负债表层级结构解析16 全球旋转地图17 制作水果拼盘18 和弦图19 智能切片器20 信息柱状图21 龙卷风图22 雷达图
OpenGL
中
关于
坐标
系
原点
在
左上角
还是
左下角
的一些整理
各轴之间的顺序要求符合右手法则,即以右手握住Z轴,让右手的四指从X轴的正向以90度的直角转向
Y轴
的正向,这时大拇指所指的
方向
就是Z轴的正向.这样的三个
坐标
轴构成的
坐标
系称为右手空间直角
坐标
系.与之相对应的是左手空间直角
坐标
系。 1.OPENGL设备
坐标
系(dns)是左手
坐标
系,屏幕
坐标
系
原点
在
左下角
向上向右增加 OPENGL屏幕
坐标
系
原点
在
左下角
向上向右增加,D3D屏幕
坐标
系
原点
在
左上角
向下向右增...
MATLAB使用imshow之后plot的
坐标
原点
在
左上角
!
在MATLAB使用imshow显示一张图后,如果继续在这张图
中
使用plot画图,则此时
坐标
原点
换到了
左上角
,不再是
左下角
了,如下面的例子: figure(1); imshow(K) hold on plot(x,y) %此时
原点
在
左上角
...
Java
50,530
社区成员
85,610
社区内容
发帖
与我相关
我的任务
Java
Java相关技术讨论
复制链接
扫一扫
分享
社区描述
Java相关技术讨论
java
spring boot
spring cloud
技术论坛(原bbs)
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享