社区
单片机/工控
帖子详情
制作小车问题——L298N驱动二个直流电机,有图~
南气子水
2011-07-31 07:20:28
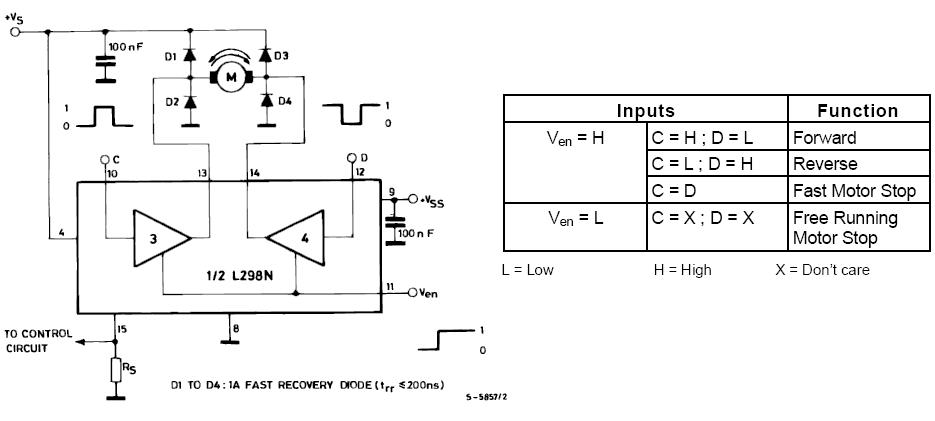
这是我用的电路,先上图:
我的电源电路:
5节干电池供电(7.5V),经过7805出来5V。
问题:
一开始我L298N端的Vss和Vs我都接的是7805出来的5V,此时小车可以动,但感觉走不动,于是我加大小车电机电压,把Vs接在5节干电池上,我想这样的话就是7.5V供电了,应该比刚才好吧,可不想这下直接不动了?
...全文
412
3
打赏
收藏
制作小车问题——L298N驱动二个直流电机,有图~
这是我用的电路,先上图: 我的电源电路: 5节干电池供电(7.5V),经过7805出来5V。 问题: 一开始我L298N端的Vss和Vs我都接的是7805出来的5V,此时小车可以动,但感觉走不动,于是我加大小车电机电压,把Vs接在5节干电池上,我想这样的话就是7.5V供电了,应该比刚才好吧,可不想这下直接不动了?
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
3 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
南气子水
2011-08-02
打赏
举报
回复
[Quote=引用楼主 mhjerry 的回复:]
这是我用的电路,先上图:
我的电源电路:
5节干电池供电(7.5V),经过7805出来5V。
问题:
一开始我L298N端的Vss和Vs我都接的是7805出来的5V,此时小车可以动,但感觉走不动,于是我加大小车电机电压,把Vs接在5节干电池上,我想这样的话就是7.5V供电了,应该比刚才好吧,可不想这下直接不动了?
[/Quote]
非常感谢,果真是电池的问题,我换了5节南孚电池,小车跑的飞快呀!
同样电池,差距咋就这么大。都怪我当初贪图他便宜1元一节,汗
南气子水
2011-08-02
打赏
举报
回复
[Quote=引用 1 楼 bjtea 的回复:]
电池的内阻很大,不至于烧芯片;
7805的输入端需要供电9伏以上,才能保证在有负载下,输出稳定的5V。7.5V偏低;
电池质量不行,换新的吧。或者暂时背上有线电源,省点钱。
[/Quote]那我换个南孚电池,试试
bjtea
2011-07-31
打赏
举报
回复
电池的内阻很大,不至于烧芯片;
7805的输入端需要供电9伏以上,才能保证在有负载下,输出稳定的5V。7.5V偏低;
电池质量不行,换新的吧。或者暂时背上有线电源,省点钱。
单片机循迹
小车
设计.pptx
单片机原理 第九章 单片机应用系统设计与开发 单片机循迹
小车
设计全文共24页,当前为第1页。 智能循迹
小车
设计(一) 车道偏离预警系统 初识循迹
小车
单片机循迹
小车
设计全文共24页,当前为第2页。 通过对视频和实物的观察,智能循迹
小车
由哪些单元模块组成?
问题
一 智能循迹
小车
组成模块包括:单片机控制模块、电机
驱动
模块、循迹模块,以及键盘等其他模块组成。 单片机循迹
小车
设计全文共24页,当前为第3页。 智能循迹
小车
原理框图 运动轨迹检测 单片运算 小运动 循迹
小车
工作原理: 循迹
小车
通过高发射功率红外光电二极管和高灵敏度光电晶体管组成的传感器循迹模块判断黑线路径,然后由单片机通过IO口控制电机
驱动
模块改变两个
直流电机
的工作状态,最后实现
小车
循迹。 单片机循迹
小车
设计全文共24页,当前为第4页。 第一部分 单片机最小系统 延迟符 1 电源 2 晶振电路 3 复位电路 单片机循迹
小车
设计全文共24页,当前为第5页。 单片机最小系统 电源 晶振电路 复位电路 单片机循迹
小车
设计全文共24页,当前为第6页。 第二部分 循迹检测模块 延迟符 1 循迹电路 2 循迹程序 单片机循迹
小车
设计全文共24页,当前为第7页。 红外发射管 红外接收管 循迹传感器:红外对管 单片机循迹
小车
设计全文共24页,当前为第8页。 循迹传感器:红外对管电路 无黑线 接收管导通 5脚为低电平 输出端为低电平 有黑线 接收管截止 5脚为高电平 输出端为高电平 单片机循迹
小车
设计全文共24页,当前为第9页。 循迹传感器:红外对管电路 单片机循迹
小车
设计全文共24页,当前为第10页。 循迹程序 管脚声明 sbit left=P3^5; //左接收管 sbit middle=P3^6; //中接收管 sbit right=P3^7; //右接收管 右转 if(left==0&middle==0&right==1) //001 { rightrun(); } 左转 if(left==1&middle==0&right==0) //100 { leftrun(); } if(left==0&middle==1&right==0) //100 { forward(); } 前进 单片机循迹
小车
设计全文共24页,当前为第11页。 第三部分
小车
运动控制模块 1 电机
驱动
电路 2 运动控制程序 3 电机调速控制 单片机循迹
小车
设计全文共24页,当前为第12页。 循迹智能
小车
的运动控制(前进、后退、左转、右转如何实现)?
问题
二 通过电机
驱动
模块
驱动
小车
电机运动.(
L298N
内部有两个高电压大电流全桥式
驱动
电路,这样电机的运转只需要用三个信号控制:两个方向信号和一个使能信号.) 单片机循迹
小车
设计全文共24页,当前为第13页。 电机及其
驱动
电机 电机
驱动
LM298 单片机循迹
小车
设计全文共24页,当前为第14页。 电机
驱动
芯片L298 单片机循迹
小车
设计全文共24页,当前为第15页。 电机
驱动
电路
L298N
内部有两个高电压大电流
驱动
电路,可以用来
驱动
直流电动机,运转只需要用三个信号控制:两个方向信号和一个使能信号。 L298逻辑输入端为IN1,IN2,IN3,IN4,其中IN1,IN2控制电机M1,IN3,IN4控制电机M2。IN1=1,IN2=0,M1正转;IN1=0,IN2=1,,M1反转。 单片机循迹
小车
设计全文共24页,当前为第16页。 电机
驱动
模块电路设计——
L298N
驱动
原理 IN1 IN2 ENA OUT1 OUT2 转向 0 0 1 0 0 停 1 0 1 1 0 正 0 1 1 0 1 反 1 1 1 1 1 停 0 0 0 ---- ---- 停 1 0 0 ---- ---- 停 0 1 0 ---- ---- 停 1 1 0 ---- ---- 停 单片机循迹
小车
设计全文共24页,当前为第17页。 软件流程图—主流程图 单片机循迹
小车
设计全文共24页,当前为第18页。 电机
驱动
程序 /*********************第一部分 管脚声明*********************/ sbit M1=P2^0; //定义电机接口 *4 sbit M2=P2^1; sbit M3=P2^2; sbit M4=P2^3; sbit left=P3^5; //左接收管 sbit middle=P3^6; //中接收管 sbit right=P3^7; //右接收管 } 单片机循迹
小车
设计全文共24页,当前为第19页。 /******************第二部分 电机控制子函数******************/ void forward () //
小车
前进 {IN1=1;IN2=0; IN3=1;IN4=0; } void back() //
小车
电赛作品资料,循迹
小车
DIY
制作
包括电路图、程序源码-电路方案
该智能
小车
基于STC12LE5412AD单片机设计,硬件组成:反射式光电轨迹采样电路、MCU控制部分、
直流电机
H 桥
驱动
器部分、
小车
USB下载 RF接口部分。 此项目为“寻迹
小车
”的升级,在结构上作了改进,码盘从10(20)个/圈提高到 50(100)个圈;同时,改进了电机的
驱动
防护逻辑,既能实现电机的四个状态,保证不短路,还可以使PWM控制的软件耗费大大减少,而且一个电机只需使用3个I/O口(原来为 4个)。其余没做大的改动,所以程序只要要修改的是电机
驱动
部分。 为了能使用PCA硬件实现PWM,以便于使用RTOS,暂时取消PWM的频率修改功能,日后有更好的方案再考虑。因为程序要支持寻迹的所有功能,所以将程序分成模块化,便于阅读和调试。 程序分为: 1) 主控程序 —— 调度所有消息,初始化系统 2) 电机
驱动
模块 —— 包含所有与电机
驱动
有关的函数,接受不同的控制命令,并付诸实施; 3) 轨迹采样模块 —— 包含所有与轨迹采样有关的处理,结果为与处理后的轨迹状态; 4) 走轨迹控制模块 —— 读取轨迹采样所获取的信息,根据需求和策略输出相应的电机控制命令;将调试的相关功能也纳入此模块。 循迹
小车
详细资料包括电路图、软件编程源码截图:
STM32学习记录——
L298N
驱动
STM32学习记录——
L298N
驱动
PS:小编第一次尝试写博客,作为自己的学习记录,仅是自己的浅薄使用。 硬件 1.正点原子STM32F103ZET6开发板。 2.
L298N
电机
驱动
模块。 3.直流减速电机。 模块使用 1.输出A接及B可以各自接一
直流电机
2.若使用12V供电,将12V供电端口及GND接上电源正负,模块GND还需一根线接上开发板的GND。 3.逻辑A与B需要使能,可以用跳线帽,也可以将下方的引脚接上单片机的IO口,程序中使能。 4.逻辑输入四个端口接单片机四个IO口,每两个一侧的端口控制
Micropython——
L298N
电机
驱动
模块
文章目录
L298N
电机
驱动
模块PWM调速原理
直流电机
接线PWM代码
L298N
电机
驱动
模块
L298N
电机
驱动
模块可以直接
驱动
两路 3-16V
直流电机
,并提供了 5V 输出接口(输入最低只要 6V),可以给5V单片机电路系统供电 (低纹波系数),支持3.3V MCU ARM 控制,可以方便的控制
直流电机
速度和方向,也可以控制2相步进电机, 5线4相步进电机,是智能
小车
必备利器。 PWM调速原理 PWM全称为“Pulse Width Modulation”。中文:脉冲宽度调制。脉冲宽度指的是 脉冲持续的
一起玩儿物联网人工智能
小车
(ESP32)——75 用
L298N
驱动
步进电机
摘要:本文介绍如何使用
L298N
驱动
步进电机
单片机/工控
27,374
社区成员
28,770
社区内容
发帖
与我相关
我的任务
单片机/工控
硬件/嵌入开发 单片机/工控
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 单片机/工控
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享


