

19,466
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
 [/quote没关系。非常感谢与你的交流。祝好~
[/quote没关系。非常感谢与你的交流。祝好~
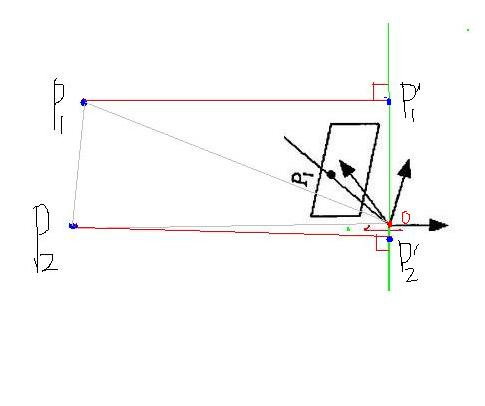
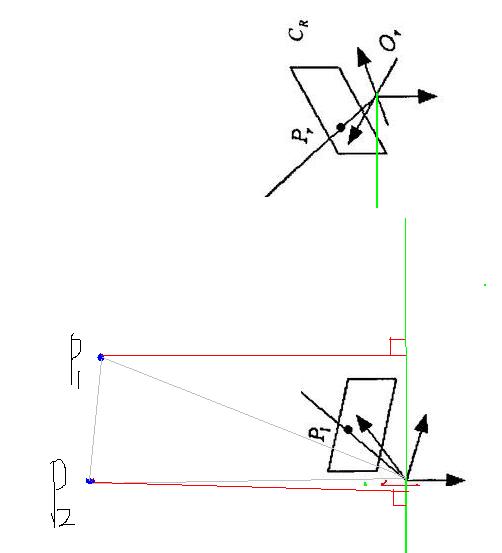 。我的思路对吗?如何求这个距离呢?我的想法是建立坐标系时,世界坐标系的Y轴就取穿过下相机光心的竖直线。但是Z轴和X轴不知该如何描述,它们的选择有多种,Z轴肯定在水平面内,并且指向目标点所在的视野。您说,我建立这样一个坐标系可行吗?以下相机光心为原点,经过下相机光心的竖直线为Y轴,以经过光心的水平面并且指向目标点所在的场景的直线为Z轴,以垂直于ZY面的直线为X轴建立世界坐标系,那么最终按照坐标系变换方法算出的目标点的三维坐标中的Z值就是目标点到镜头的距离了。其实更准确的说法是目标点到穿过光心所在竖直线的距离。
。我的思路对吗?如何求这个距离呢?我的想法是建立坐标系时,世界坐标系的Y轴就取穿过下相机光心的竖直线。但是Z轴和X轴不知该如何描述,它们的选择有多种,Z轴肯定在水平面内,并且指向目标点所在的视野。您说,我建立这样一个坐标系可行吗?以下相机光心为原点,经过下相机光心的竖直线为Y轴,以经过光心的水平面并且指向目标点所在的场景的直线为Z轴,以垂直于ZY面的直线为X轴建立世界坐标系,那么最终按照坐标系变换方法算出的目标点的三维坐标中的Z值就是目标点到镜头的距离了。其实更准确的说法是目标点到穿过光心所在竖直线的距离。 ,可能这种测量方式本身误差就很大 ,但是实在没找到别的适合方式。 同样OA方向上的10mm距离 在Z方向上算的就有差别,我测了两组实验 9.872026 mm和 10.0116mm , OA方向上的20mm 的距离在Z方向上是19.883648 。 vs:我左右图像目标点是手动取点的。就是鼠标分别点击左、右图像目标点。[/quote],可能这种测量方式本身误差就很大 ,但是实在没找到别的适合方式。 同样OA方向上的10mm距离 在Z方向上算的就有差别,我测了两组实验 9.872026 mm和 10.0116mm , OA方向上的20mm 的距离在Z方向上是19.883648 。 vs:我左右图像目标点是手动取点的。就是鼠标分别点击左、右图像目标点。
,可能这种测量方式本身误差就很大 ,但是实在没找到别的适合方式。 同样OA方向上的10mm距离 在Z方向上算的就有差别,我测了两组实验 9.872026 mm和 10.0116mm , OA方向上的20mm 的距离在Z方向上是19.883648 。 vs:我左右图像目标点是手动取点的。就是鼠标分别点击左、右图像目标点。[/quote],可能这种测量方式本身误差就很大 ,但是实在没找到别的适合方式。 同样OA方向上的10mm距离 在Z方向上算的就有差别,我测了两组实验 9.872026 mm和 10.0116mm , OA方向上的20mm 的距离在Z方向上是19.883648 。 vs:我左右图像目标点是手动取点的。就是鼠标分别点击左、右图像目标点。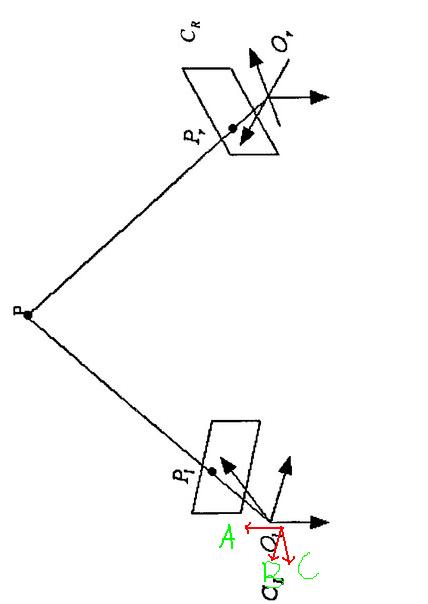 红色的坐标系 是以下面相机的光心为原点,以水平面OA方向为Z轴,以竖直方向OC位Y轴,OB为X轴建立的坐标系。我现在求出的三维坐标是世界坐标系与下相机坐标系重合的情况下的。所以 求出的Z并不是目标点下相机光心的距离,而只是Z方向的一个分量而已。
红色的坐标系 是以下面相机的光心为原点,以水平面OA方向为Z轴,以竖直方向OC位Y轴,OB为X轴建立的坐标系。我现在求出的三维坐标是世界坐标系与下相机坐标系重合的情况下的。所以 求出的Z并不是目标点下相机光心的距离,而只是Z方向的一个分量而已。
