我在写一个关于在java服务器下,操作数据库将ResultSet结果集中的数据导入到Excel表中程序。完全借用了别人的代码,我是在database.java中创建了此函数代码如下public static boolean DB2Excel(ResultSet rs, String fileName) {
boolean flag = false;
WritableWorkbook workBook = null;
WritableSheet sheet = null;
Label label = null;
try {
// 创建Excel表
String path = AutoStatisticUser.class.getResource("").getPath()
+ fileName;
workBook = Workbook.createWorkbook(new File(path));
// 创建Excel表中的sheet
sheet = workBook.createSheet("First Sheet", 0);
// 向Excel中添加数据
ResultSetMetaData rsmd = rs.getMetaData();
int columnCount = rsmd.getColumnCount();
String columnName = null;
int row = 0;
// 添加标题
for (int i = 0; i < columnCount; i++) {
columnName = rsmd.getColumnName(i + 1);
label = new Label(i, row, columnName);
System.out.println("标题:" + i + "---" + row + "---"
+ columnName);
sheet.addCell(label);
}
row++;
System.out.println("写入标题成功");
while (rs.next()) {
for (int i = 0; i < columnCount; i++) {
label = new Label(i, row, rs.getString(i + 1));
System.out.println("标题:" + i + "---" + row + "---"
+ rs.getString(i + 1));
sheet.addCell(label);
}
row++;
}
System.out.println("写入内容成功");
// 关闭文件
workBook.write();
System.out.println("数据成功写入Excel");
flag = true;
} catch (Exception e) {
e.printStackTrace();
} finally {
try {
workBook.close();
} catch (Exception e2) {
e2.printStackTrace();
}
}
return flag;
}
但是在创建excel的那段代码会出错如图
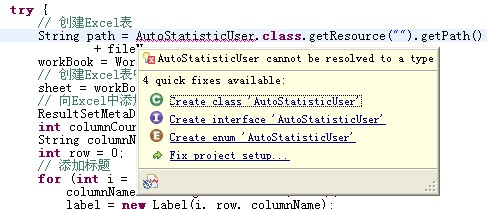
。不知哪位大神知道,请给小弟说下


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

 你程序里没有这个类 当然会报这个错啊
你程序里没有这个类 当然会报这个错啊

