各位帮助看看,源码可以用在什么设备上。
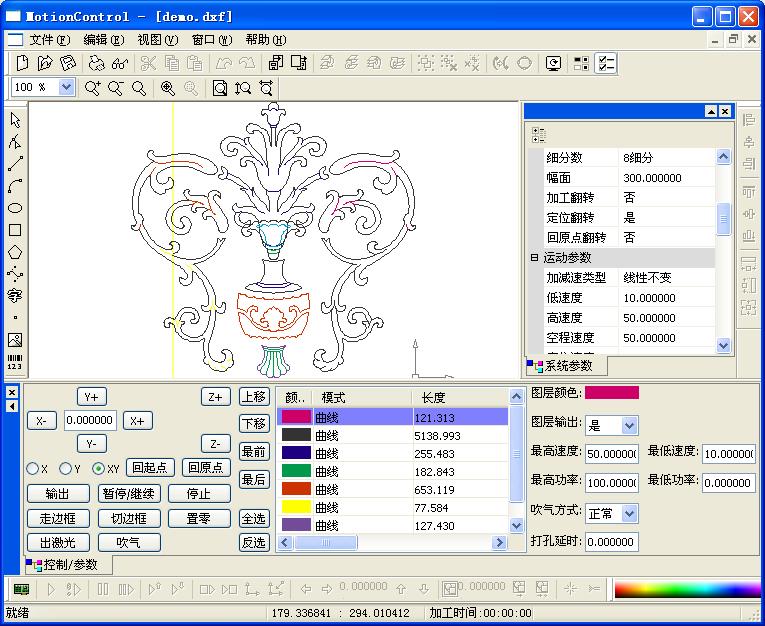
图形输出控制软件,主要适用于激光切割、雕刻等,步进电机控制图形输出的设备。支持LPT并口控制和USB下载控制。
完整的程序和源码,到本人本站下载空间或如下:
百度网盘:
http://pan.baidu.com/s/1eQBrDnk
新浪网盘:
http://ishare.edu.sina.com.cn/f/62809873.html
界面如下:
资料包含:
上位机源码:控制设备输出的源码;
下位机源码:芯片(ARM、DSP等)控制源码;
接口源码:可重编程的源码,供完善程序;
端口控制源码:LPT并口控制和USB端口下载源码;
程序文件:控制软件的可执程序和程序演示视频。
程序可用于电机控制测试和应用于根据图形输出的控制软件。
希望为电机控制、电路控制设计、编程爱好的朋友所用。



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

