简单说明一下,使用系统的API,比如播放进度,使用MCI,获取整首歌的长度,然后获得播放位置,将整首歌的长度设置为进度条范围,将播放位置,设置为进度条当前进度。 至于音量的话,你使用MIXER ,这个甚至可以调节整个计算机的音量。 关注我一下,私信我邮箱地址,我这刚好做过着两个东西。可以将这些发给你。
[quote=引用 5 楼 baijiaheizhiganmao 的回复:] 简单说明一下,使用系统的API,比如播放进度,使用MCI,获取整首歌的长度,然后获得播放位置,将整首歌的长度设置为进度条范围,将播放位置,设置为进度条当前进度。 至于音量的话,你使用MIXER ,这个甚至可以调节整个计算机的音量。 关注我一下,私信我邮箱地址,我这刚好做过着两个东西。可以将这些发给你。
你的功力有多深呢?继续一个静态文本控件,在控件上面画线条,根据播放文件的长度来确定播放进度
3,881
社区成员
9,044
社区内容
加载中
试试用AI创作助手写篇文章吧



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享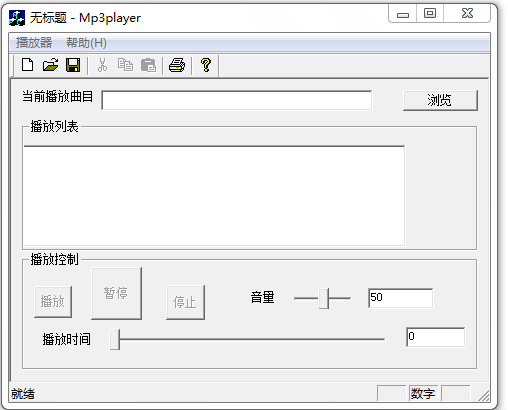 因为这个程序改的乱七八糟。。。心塞。。
因为这个程序改的乱七八糟。。。心塞。。



