UVN相机的计算过程
n = lookat - eye
v = [0,1,0]
u = v x n;
v = n x u;
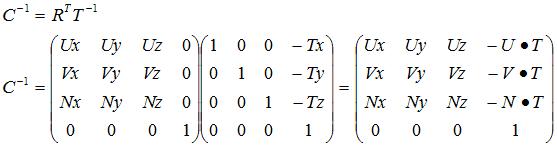
最后结果矩阵就是这样
我的loodat一直都是[0,0,0],
可以如果分别代入eye[0, cos(t), sin(t)],和,eye[0, cos(t), -sin(t)]得到的矩阵分别是:
-1 0 0 0
0 -sint -cost 0
0 -cost -sint 0
0 -cost -sint 1
和
1 0 0 0
0 cost sint 0
0 -sint cost 0
0 -cost sint 1
这样就是某个观察点点[100, 0, 0]来说,分别就是
[100, -cost, sint]和[-100, -cost, -sint]。
就是说如果相机y轴上偏eye[0, cos(t), sin(t)]移动到eye[0, cos(t), -sin(t)]上的时候,其实就是在Y轴上下摆角度t,这样观察点就会从左右一下摆到右边。。。。
代码调试的结果也是那样,上面是手算的。。。。
不知道是我对UVN相机的理解不对。。。。



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

