想請問一下
今天執行別人給我它的完整BCB 程式檔案時 會談出一個錯誤訊息視窗
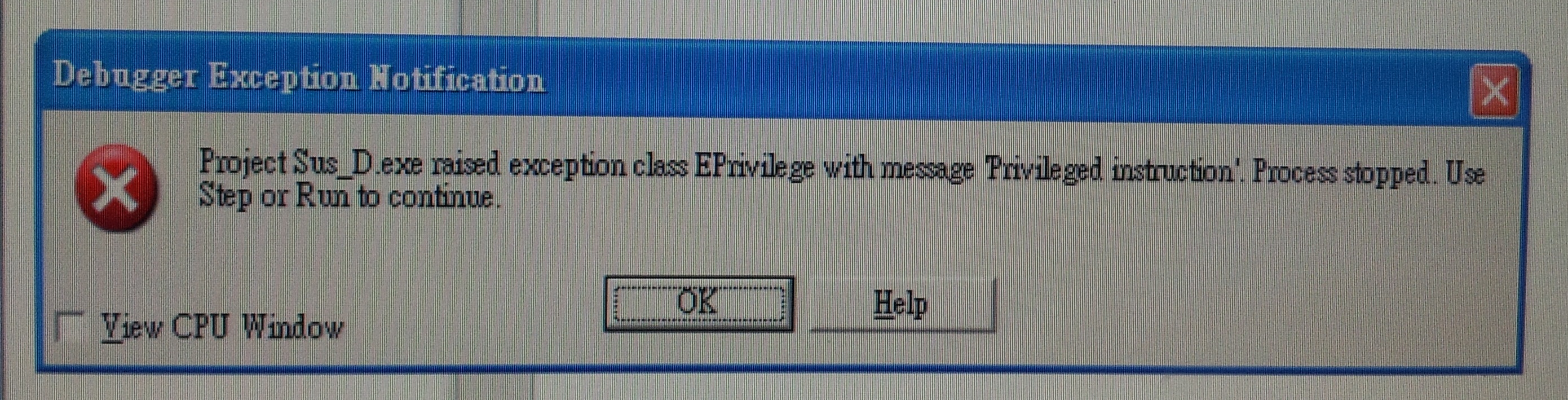
『Privileged instruction』
上網查了一下 說明是特權指令,有些指令是被受到限制的。
自己也第一次遇到這樣,也不知道哪些指令是受到限制的,且在他自己的電腦執行卻都沒問題,
請問遇到這樣問題該怎麼解決呢?
還是我BCB的版本用太新?還是太舊?
有看到網友說不能在WIN2000下執行某指令?那WIN7 WIN XP也不行?
還有網友說可以修改權限的?
有沒有甚麼其他方法可以解決?
我的電腦是WIN7 跟 WIN XP 兩台都試過了
BCB是用 Borland C++ Builder 6
控制卡是用 PCI-8136
如果需要看 整個程式語言 可以留言跟我說喔^^

 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享


 Program received signal SIGILL, Illegal instruction. 0x46096268 in ?? () from /lib/libcrypto.so.1.0.
Program received signal SIGILL, Illegal instruction. 0x46096268 in ?? () from /lib/libcrypto.so.1.0.