社区
机器视觉
帖子详情
固定场景,不同角度拍摄,图像上的特征点的梯度幅值和方向会变化吗?
anhuidaxue100
2015-08-05 09:29:28
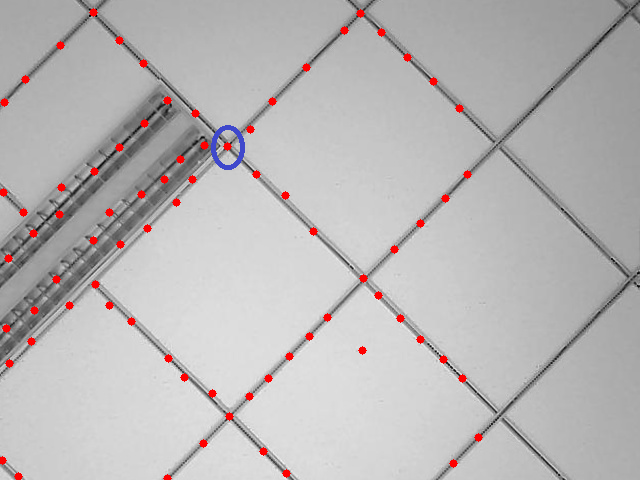
摄像机离天花板的高度始终不变,在某一位置拍了一帧图像,移动一定距离和旋转一定角度后再拍一帧图像;两帧图像有很多的共同特征点。
问题:下图蓝色圆圈中的红点为天花板上的某特征点在两帧图像上的位置,请问,这两点在图像上的梯度值和方向相同吗?
【原图片】
求指导啊!挺急的!!
...全文
401
9
打赏
收藏
固定场景,不同角度拍摄,图像上的特征点的梯度幅值和方向会变化吗?
摄像机离天花板的高度始终不变,在某一位置拍了一帧图像,移动一定距离和旋转一定角度后再拍一帧图像;两帧图像有很多的共同特征点。 问题:下图蓝色圆圈中的红点为天花板上的某特征点在两帧图像上的位置,请问,这两点在图像上的梯度值和方向相同吗? 【原图片】 求指导啊!挺急的!!
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
9 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
reader1
2015-08-06
打赏
举报
回复
这时候的梯度一般不相同的吧。你查一下角点检测,能解决问题。不难。
Trent1985
2015-08-05
打赏
举报
回复
这种算法好像也不少吧,我没搞过这个,但是看到过特征点匹配的,你搜下!
anhuidaxue100
2015-08-05
打赏
举报
回复
引用 5 楼 Trent1985 的回复:
还有图像拼接
我实质是要做图像匹配的,但是找不到有效的办法。匹配的点对与真实的点对间存在较大偏移,不知道怎么办。。。。。
Trent1985
2015-08-05
打赏
举报
回复
还有图像拼接
Trent1985
2015-08-05
打赏
举报
回复
这个是图像匹配的问题了,你可以百度一下,图像匹配的算法很多的,而且不是一两句可以说清楚的了!
anhuidaxue100
2015-08-05
打赏
举报
回复
引用 2 楼 Trent1985 的回复:
是梯度的绝对值相同,说的严谨一点。因为梯度是有方向的,比如周围八个方向,所以方向是不同的。
你好,能不能根据什么样的信息将两帧图像的点匹配起来呢,假如我知道第一帧图像中的某点在第二幅图像上的大致位置
Trent1985
2015-08-05
打赏
举报
回复
是梯度的绝对值相同,说的严谨一点。因为梯度是有方向的,比如周围八个方向,所以方向是不同的。
Trent1985
2015-08-05
打赏
举报
回复
梯度值相同,方向不同的!
anhuidaxue100
2015-08-05
打赏
举报
回复
我试了surf sift除非自己编程实现 opencv不提供提取单独点的特征
海面目标的红外景象增强技术研究
海天类红外
图像
的增强要求去除风浪等的环境影响,同时增强目标区域的对比度。通过探索几种典型的
图像
增强算法,结合红外
图像
梯度
幅值
直方图特点,提出基于
梯度
域的海面红外
场景
增强算法,将低
梯度
值置零去除海浪干扰,调整
梯度
范围对结果控制亮度,利用有效
梯度
范围均衡化增强目标区域的细节。实验结果表明,该算法可以明显降低
图像
的干扰信息,同时提高目标区域的对比度和信息熵。
颜色分类leetcode-awesome-defocus-detection:散焦检测和
图像
质量评估论文和代码的精选列表
颜色分类leetcode 真棒散焦检测 文件: 基于局部相位相干测量的无参考
图像
清晰度评估 景深扩展的非参数模糊映射回归 基于
梯度
幅值
多尺度融合排序变换系数的空间
变化
模糊检测 基于 LBP 的离焦模糊分割 判别式模糊检测功能 模糊
图像
区域检测与分类 用于散焦估计的多尺度深度和手工特征的统一方法 学习理解
图像
模糊 使用域适应的深度散焦图估计 通过多流底部-顶部-底部全卷积网络进行散焦模糊检测 DeFusionNET:通过反复融合和细化多尺度深度特征进行散焦模糊检测 通过局部补丁的等级估计散焦模糊 DeepBlindness:室外
场景
单色
图像
的快速盲区图估计和盲区类型分类 从合成模糊
场景
中进行自我监督的模糊检测 通过交叉集成网络增强散焦模糊检测器的多样性 通过分类进行模糊检测 数据集: [Shi et al.'s] CUHK 数据集 [EC Larson 等人的] CSIQ
图像
质量数据库 [Lee 等人的] SYNDOF [Wenda Zhao et al.'s] DUT-DBD [Alekseev A.]模糊检测数据集 [github]自动对焦的清晰度 质量保证: [!!! 索塔] [
玩转Python
图像
处理
课程包含数字
图像
处理的常用知识点,覆盖面全,方便学员系统深入全面地掌握OpenCV。 【你将收获什么】 1. 掌握数字
图像
的在计算机内表示的方法和处理的基本原理。掌握数字
图像
的表示方法是进行
图像
处理的前提...
基于多特征融合级联分类器的高速公路交通流检测方法研究 (2014年)
本文针对复杂的高速公路环境,对鲁棒的交通流检测算法进行研究,建立了有效的基于多特征融合级联分类器的高速公路交通流检测系统。本算法改善了现有常见交通流检测技术特征单一的劣势,采用了多特征融合的方式,利用目标的颜色、
梯度
幅值
、
梯度
直方图等多种
图像
特征,并通过级联分类器的方式建立检测器,使算法有较好的时效性。实验表明,此算法及系统能够快速准确地检测高速公路
场景
下的交通流,对各种外观以及
角度
的车辆均表现出较好的检测效果,具有较好的鲁棒性。
基于单目视觉的非结构化道路检测与跟踪 (2011年)
针对智能车辆视觉导航中的车道保持问题,采用单目视觉技术检测非结构化道路上的车道线和道路边界,解决
不同
路况下道路检测的鲁棒性与实时性问题。首先用一种自适应阈值分割Otsu方法把道路分为道路区域和非道路区域;然后利用Otsu算法处理后的
图像
对Canny边缘进行滤波,在消除复杂背景边缘的同时保留可能的弱的道路边界;最后,用直线长度、平均
梯度
幅值
、直线距离和直线
角度
四元组联合表示霍夫直线,采用蒙特卡罗方法对属于道路边界的霍夫直线的后验置信度进行评价,根据最大权值提取出最优道路边界线。
不同
场景
下的非结构化道路识别实
机器视觉
4,445
社区成员
15,335
社区内容
发帖
与我相关
我的任务
机器视觉
图形图像/机器视觉
复制链接
扫一扫
分享
社区描述
图形图像/机器视觉
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享



