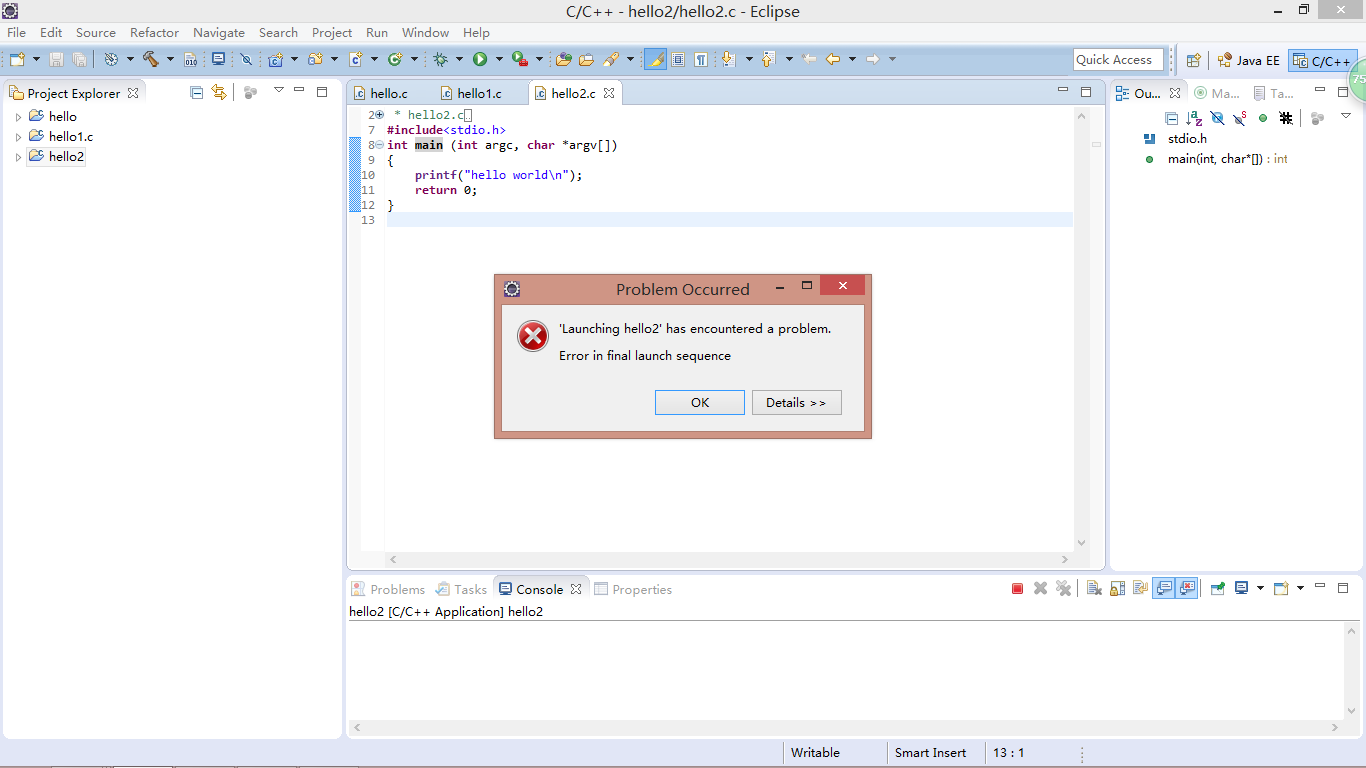
编译的C CDT 原ECLIPSE是java 后加的c/c++ 编debug出现 error in final launch sequence
details:Error in final launch sequence
Failed to execute MI command:
-exec-run
Error message from debugger back end:
Error creating process F:/c/hello2/Debug/hello2, (error 193).
Error creating process F:/c/hello2/Debug/hello2, (error 193).
求解决




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
