社区
非技术区
帖子详情
MATLAB 立体视觉标定 出错
zy18730608243
2016-04-27 05:24:07
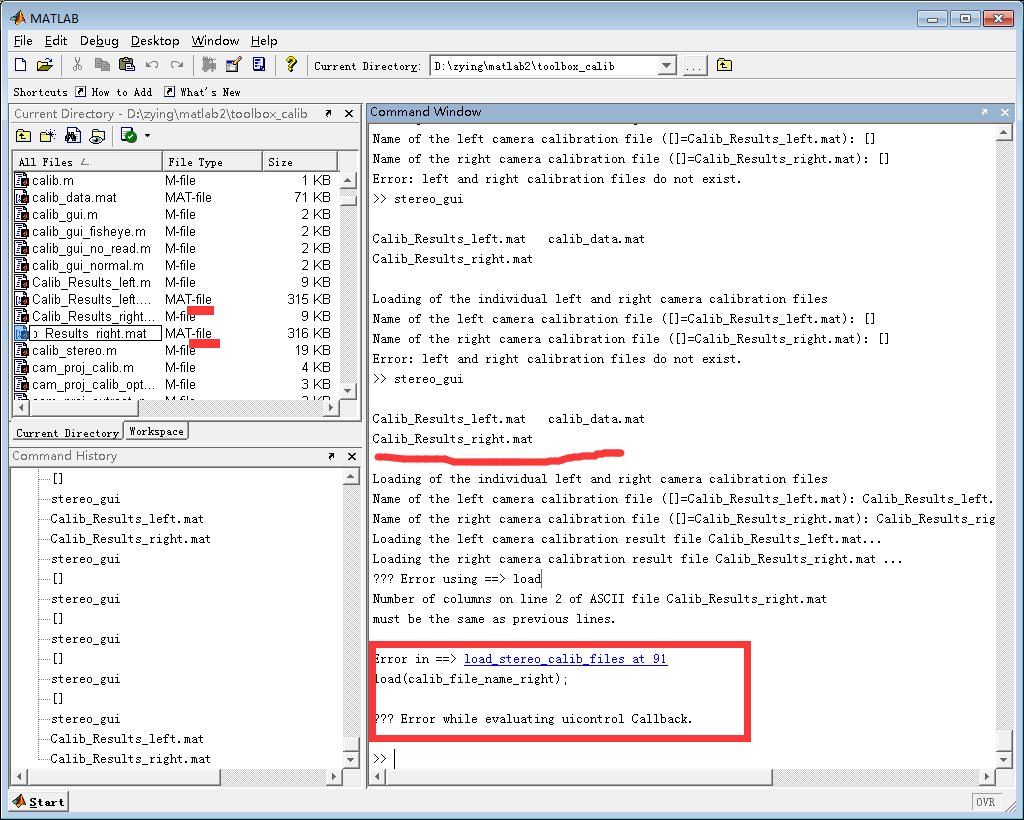
文件中明明有 左右相机的内参数标定文件,为什么读入左、右摄像机的标定文件时显示这两种文件不存在???
...全文
502
1
打赏
收藏
MATLAB 立体视觉标定 出错
文件中明明有 左右相机的内参数标定文件,为什么读入左、右摄像机的标定文件时显示这两种文件不存在???
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
1 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
小晓太阳
2019-04-30
打赏
举报
回复
你好 我的也出现这种问题了 请问您是怎么解决的
【图像处理】02
matlab
实现
立体
标定
(
立体
标定
出错
已解决)
本文详细介绍使用
Matlab
进行摄像头
标定
的过程,包括下载及安装
标定
工具箱、加载图片、提取角点、进行内外参数
标定
等步骤,并解决了
立体
标定
过程中遇到的问题。
MATLAB
双目鱼眼
标定
实战:从参数导出到
立体
校正效果验证
本文详解
MATLAB
中利用stereoCameraCalibrator工具完成双目鱼眼相机
标定
的全流程,涵盖棋盘格图像采集、鱼眼模型配置、重投影误差分析、三维可视化评估、
标定
参数导出解析,并重点介绍鱼眼专用校正方法及
立体
校正(rectifyStereoImages)原理与效果验证,包括极线对齐、畸变消除和重叠区域检验。
MATLAB
双目相机
标定
实战:从工具箱调用到参数解析
本文详细讲解
MATLAB
Stereo Camera Calibrator工具箱进行双目相机
标定
的完整流程,涵盖图像导入、畸变模型选择(径向/切向畸变配置)、内外参矩阵结构与转置要求、重投影误差诊断及优化策略。重点剖析外参(基线、旋转矩阵)、内参(焦距、主点)和畸变系数(k1-k6)的技术含义与工程应用规范,并给出同步采集、异常图像剔除等实战经验。
问题记录:|| 和 && 运算符的操作数必须能够转换为逻辑标量值。
出错
vision.CameraParameters/getValidBounds (line 694)
在使用
MATLAB
的mystereoReconstruction20140428.m进行双目
立体
视觉
标定
过程中,成功获取相机内外参数,但在极线校正阶段遇到错误:|| 和 && 运算符的操作数必须能够转换为逻辑标量值。错误出现在vision.CameraParameters/getValidBounds的第694行。进一步跟踪,错误还涉及到computeUndistortBounds、computeOutputBounds和rectifyStereoImagesImpl等函数。目前正在进行问题排查。
别再手动抄参数了!用
Matlab
标定
双目相机后,一键生成OpenCV可用的.yml文件
本文介绍如何将
Matlab
标定
工具箱生成的双目相机参数(内参、畸变系数、旋转矩阵等)自动化转换为OpenCV可读的.yml配置文件。重点解决矩阵转置、畸变系数顺序、坐标系转换等关键适配问题,并提供C++转换工具实现与OpenCV项目的无缝集成,支持参数版本化、跨平台读取和零人工错误。
非技术区
1,076
社区成员
6,258
社区内容
发帖
与我相关
我的任务
非技术区
硬件/嵌入开发 非技术区
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 非技术区
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享