社区
界面
帖子详情
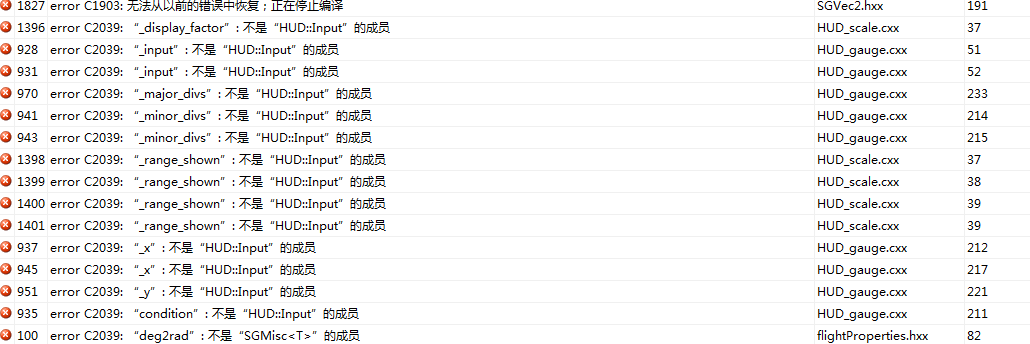
error C2039: “_display_factor”: 不是“HUD::Input”的成员
metis1022
2016-05-26 04:41:07
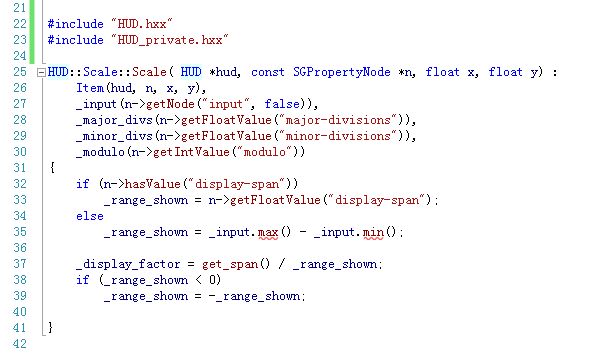
这个是报错。对应的第一条错误的代码是这样的:
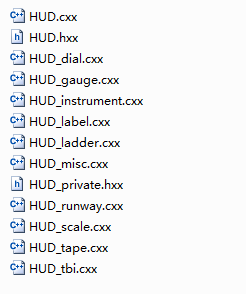
对应的其他文件有这些:
情况是这样的,我这个代码是官网上下的,代码应该不会错,有可能是缺少其他的文件或是什么。在网上找了一些解决的办法,但是都不对,这个报错下面全都都是“A不是B的成员”。我对于C++也不是很熟悉,好多都不怎么能看懂,希望大神么可以指点下,谢谢了
...全文
113
3
打赏
收藏
error C2039: “_display_factor”: 不是“HUD::Input”的成员
这个是报错。对应的第一条错误的代码是这样的: 对应的其他文件有这些: 情况是这样的,我这个代码是官网上下的,代码应该不会错,有可能是缺少其他的文件或是什么。在网上找了一些解决的办法,但是都不对,这个报错下面全都都是“A不是B的成员”。我对于C++也不是很熟悉,好多都不怎么能看懂,希望大神么可以指点下,谢谢了
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
3 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
许文君
2016-05-30
打赏
举报
回复
这个你该问SDK的提供商,或许他们对头文件的顺序有要求,或许是其他。
metis1022
2016-05-30
打赏
举报
回复
当前文件夹只有两个头文件,代码里面都已经包含了,请问下还有可能是什么头文件呢?
oyljerry
2016-05-26
打赏
举报
回复
看是不是还有其他hxx头文件没有包含
YOLOv5目标检测实战:Jetson Nano部署
PyTorch版的YOLOv5是高性能的实时目标检测方法。Jetson Nano是英伟达含有GPU的人工智能硬件。本课程讲述如何部署YOLOv5在Jetson Nano开发板上。部署完成后可进行图像、视频文件和摄像头视频的实时目标检测。...
安装ORB-SLAM2并运行SLAM样例
ORB-SLAM相关技术(经验版)
Chrome启动参数最全集合
翻译来自谷歌自动翻译,如果说明不清楚,自行查询。 序号 条件 说明 1 -- 报告伪分配跟踪。伪跟踪从当前活动的跟踪事件派生。 2 --/prefetch:1 /prefetch:启动各种流程类型时使用的#arguments。已经观察到,当文件读取与具有相同/prefetch:#参数的3个进程启动一致时,Windows预取器开始在进程启动时批量发出读取...
Cardboard Unity SDK Reference
Plugin Reference Package Contents The Unity plugin package contains the following: Scripts Cardboard.cs- Singleton connection to the native code VR device. CardboardE...
Unreal Engine 4.20 Release Notes
https://docs.unrealengine.com/en-US/Builds/4_20 Unreal Engine 4.20 Release Notes What's New Unreal Engine 4.20 delivers on our promises to give developers the scalable tools they need to succ...
界面
15,979
社区成员
115,896
社区内容
发帖
与我相关
我的任务
界面
VC/MFC 界面
复制链接
扫一扫
分享
社区描述
VC/MFC 界面
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章







 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享