废话不多说,先上图。
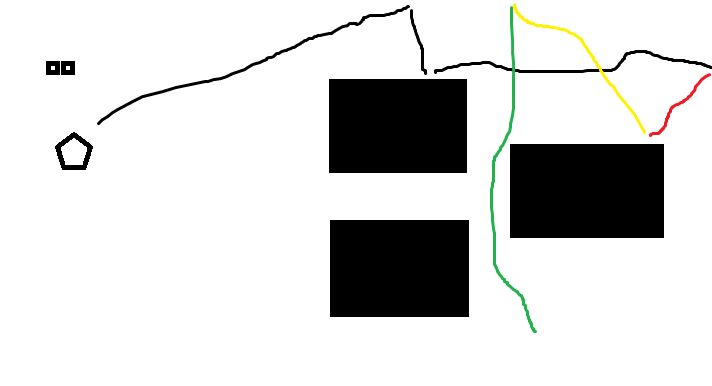
右边的黑色矩形部分是障碍,不能穿越。
左边的五边形是移动的AI。
上面两个小方格是网格。
线条是每次行走的路径轨迹。
图片的周围是边界,AI不可到达,障碍物也不可穿越 。
请问。如何保证AI的随机行走能取得上面的效果?
下面是我想到的方法
一是把上面的图片转换为一个无向图,通过寻路算法,随机找出一条途径。不足之处是需要对每个图进行标注,随着标注点的增多,算法的复杂性也上来了。
二是按照网格图进行转换,AI每行走一步,即要随机计算出下一步的路径,不足之处是走起来就跟残疾人一样,都是小碎步。
上面两个都感觉一般,太不好。
请大家给一个好点的解决办法,要满足,以下条件。
一是算法的时间复杂度比较低,最好是能和A*算法一样。
二是AI行走能像图中一样。
三是不需要人为的画出无向图的顶点。
四是图片是由上述的小网格构成的。
有点混乱。



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享








