超声波与串口通信结合的问题,调试了一天。求指教!
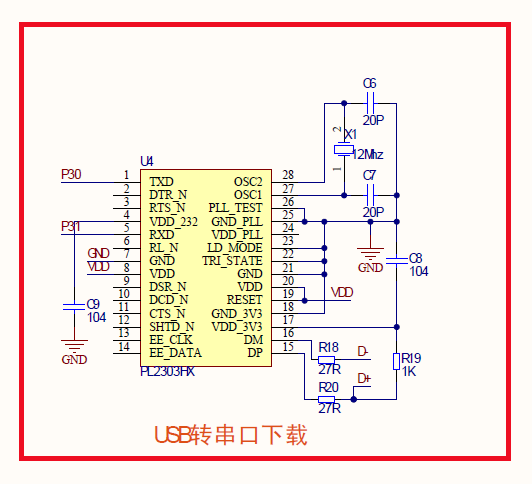
/*实现超声波测距显示在1602液晶上,并在每次距离小于700mm时向计算机发送potato。现在的问题是当超声波测距小于700mm单片机向计算机发送po,且只能测试一次,1602液晶显示保持为700mm以前的数字*/
#include<reg52.h>
#include<intrins.h>
#define uint unsigned int
#define uchar unsigned char
#define NOP() {_nop_();_nop_();_nop_();_nop_();}
//------LCD引脚-----
sbit LCD_RS=P0^7;
sbit LCD_RW=P0^6;
sbit LCD_EN=P0^5;
//------超声波引脚-------
sbit Tx=P3^3; //触发控制信号输入
sbit Rx=P3^2; //回响信号输出
sbit test=P1^1;
uchar code table[]={"Distance Test:"}; //LCD第一行显示
uchar temp_dis[]= {"000.0 cm"}; //LCD第二行
uchar code table1[]={"potato"};
long int t,distance,flag,i,a;
uchar cache[4]={0,0,0,0};
//--------延时-------
void delay(uint ms)
{
uint t;
while(ms--)
for(t=0;t<120;t++);
}
//-------读LCD状态-------
uchar read_lcd_state()
{
uchar state;
LCD_RS=0;
LCD_RW=1;
LCD_EN=1;
_nop_();
state=P2;
LCD_EN=0;
_nop_();
return state;
}
//-------忙等待------
void lcd_busy_wait()
{
while((read_lcd_state() & 0x80)==0x80);
NOP();
}
//----------LCD写指令----------
void lcd_write_com(uchar com)
{
lcd_busy_wait();
LCD_RS=0; //RS为0时,写指令,RS为1时,写数据
LCD_RW=0;
P2=com;
NOP();
LCD_EN=1;
NOP();
LCD_EN=0;
}
//----------LCD写数据----------
void lcd_write_data(uchar dat)
{
lcd_busy_wait();
LCD_RS=1;
LCD_RW=0;
P2=dat;
NOP();
LCD_EN=1;
NOP();
LCD_EN=0;
}
//-------LCD初始化-------
void lcd_init()
{
LCD_EN=0;
lcd_write_com(0x38); //LCD显示模式设置
lcd_write_com(0x0c); //LCD显示开/关及光标设置
lcd_write_com(0x06); //当写一个字符后地址指针加1,且光标加1
lcd_write_com(0x01); //显示清屏
}
//-------串口初始化-------
void chuan_init()
{
TH1=0xfd;
TL1=0xfd;
TR1=1;
SM0=0;
SM1=1;
REN=1;
ES=1;
}
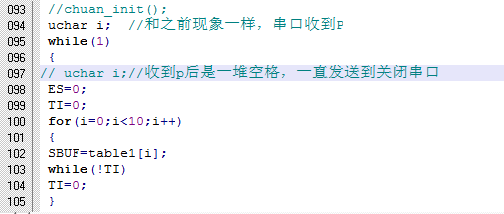
//-------串口发送数据-------
void chuan()
{
//chuan_init();
while(1)
{
ES=0;
TI=0;
for(i=0;i<10;i++)
{
SBUF=table1[i];
while(!TI)
TI=0;
}
ES=1;
}
}
//---------设置液晶显示位置-----------
void set_lcd_pos(uchar p)
{
lcd_write_com(p|0x80);
}
//---------液晶显示程序----------
void lcd_print(uchar p,uchar *s,uint low)
{
uint num;
set_lcd_pos(p);
for(num=0;num<low;num++)
{
lcd_write_data(s[num]);
delay(1);
}
}
void HC05_Init()
{
Tx=1; //触发脉冲
NOP();NOP();NOP();NOP();
Tx=0;
distance=0.17*t; //距离计算
if(flag==1)
{
if(distance<700)
{
chuan();
delay(50);
}
}
}
void distance_convert(long int dat)
{
cache[0]=dat/1000;
cache[1]=dat/100%10;
cache[2]=dat/10%10;
cache[3]=dat%10;
temp_dis[0]=cache[0]+'0';
temp_dis[1]=cache[1]+'0';
temp_dis[2]=cache[2]+'0';
temp_dis[4]=cache[3]+'0';
}
//------------主程序-----------
void main()
{
lcd_init();
delay(5);
TMOD=0x29;
chuan_init();
EA=1; //开总中断
TR0=1; //启动定时器
EX0=1; //开外部中断
IT0=1; //设置为下降沿中断方式
while(1)
{
HC05_Init();
distance_convert(distance);
lcd_print(0x01,table,14);
lcd_print(0x44,temp_dis,8);
}
}
//外部中断0
void int0() interrupt 0
{
t=(TH0*256+TL0); //计算高电平持续的时间,上升沿到来时候开始计时,下降沿到来进入外部中断,关闭计时器,停止计时
TH0=0;
TL0=0;
}
void int1() interrupt 4
{
RI=0;
a=SBUF;
if(a==1)
{
flag=1;
}
}



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
 另:在单独写串口程序是尝试将i改为局部变量,结果串口收到了一堆乱码,或者直接没有反应。
另:在单独写串口程序是尝试将i改为局部变量,结果串口收到了一堆乱码,或者直接没有反应。
 如果没有理解错,好像不行
如果没有理解错,好像不行
 。有其他简单一点的方法吗?
。有其他简单一点的方法吗?