社区
图形处理/算法
帖子详情
求旋转中心
长不大的空想者
2016-09-13 02:19:34
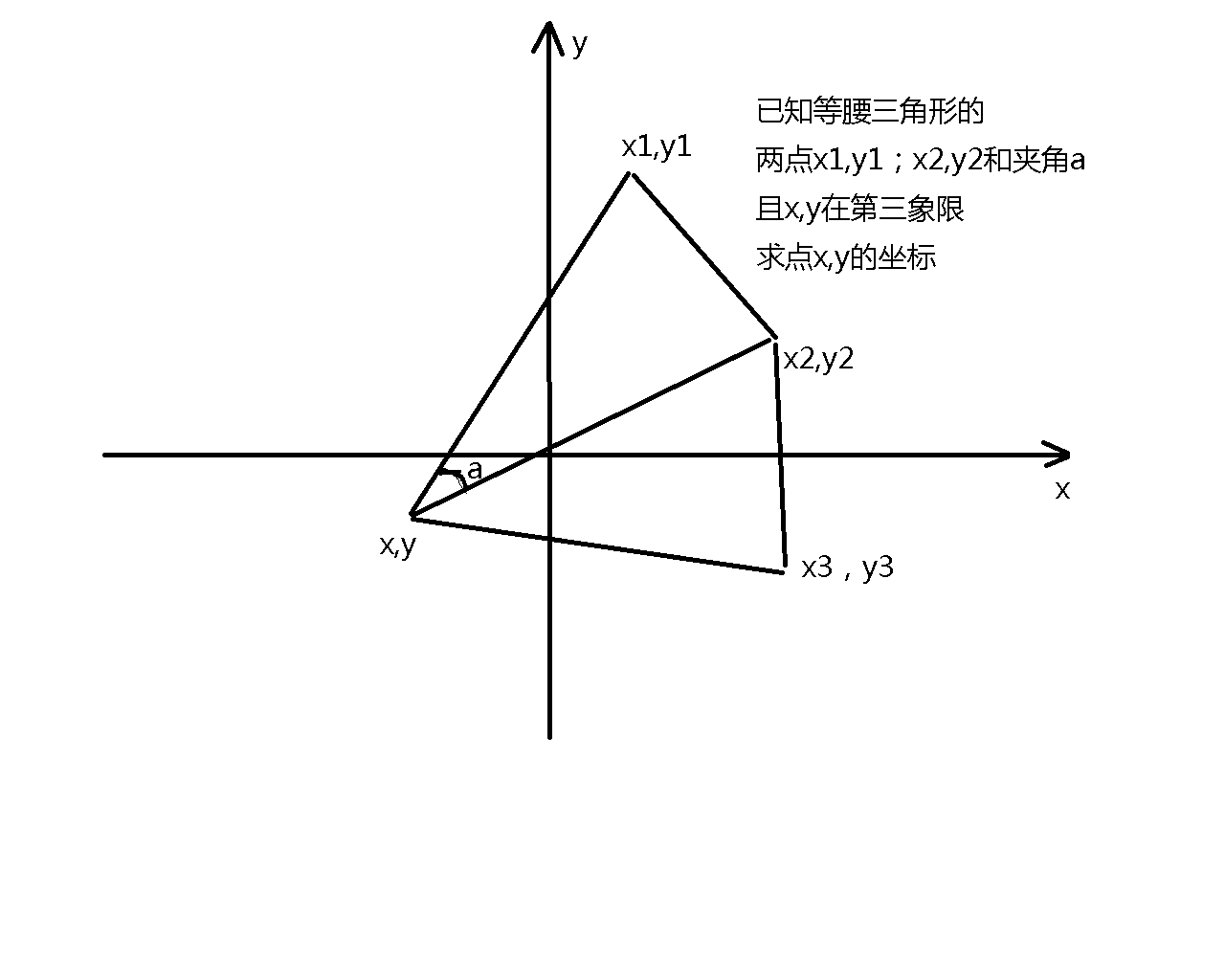
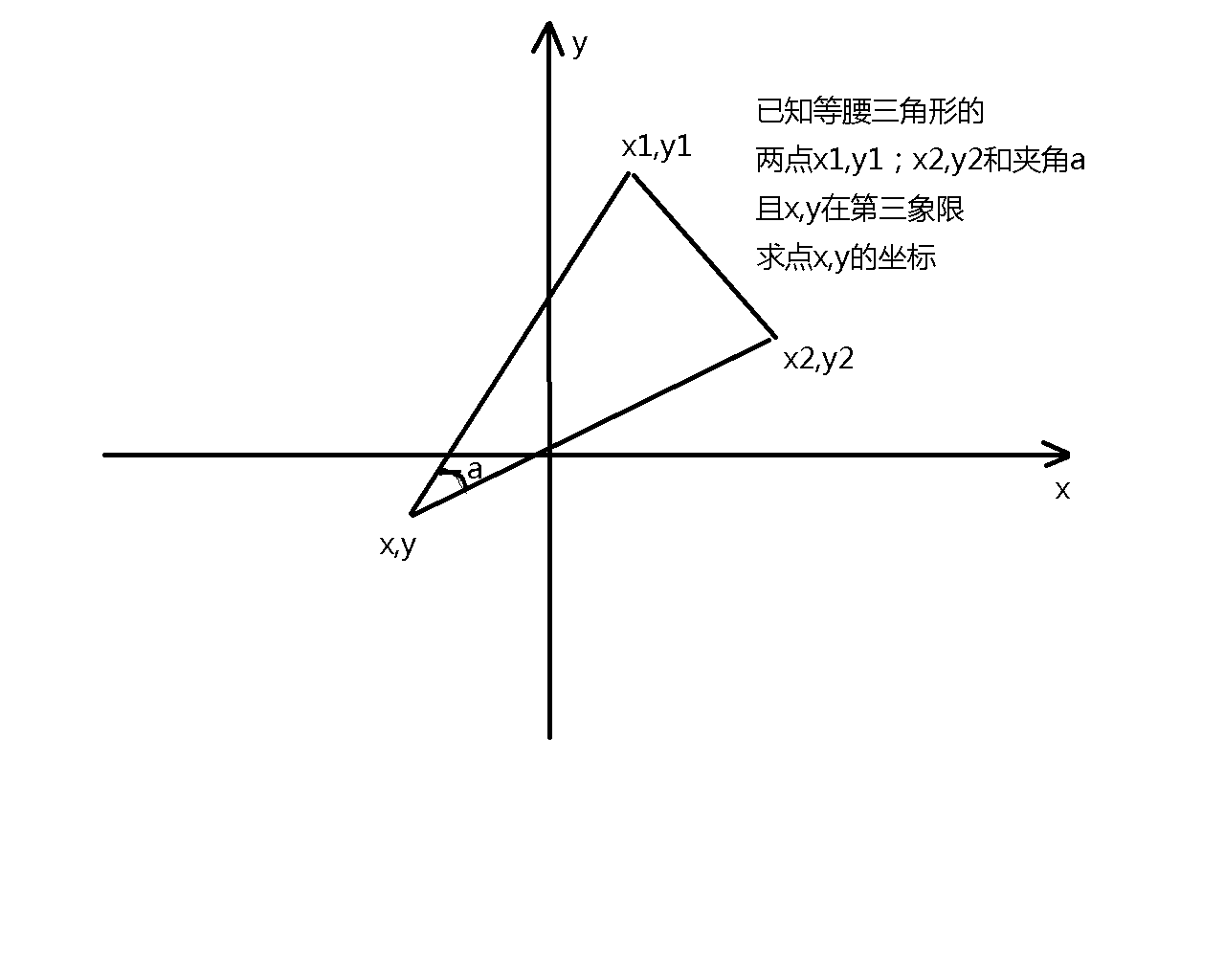
如下图,其实就是已知旋转前后点和旋转角度,求旋转中心
...全文
1587
9
打赏
收藏
求旋转中心
如下图,其实就是已知旋转前后点和旋转角度,求旋转中心
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
9 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
青山隐隐水迢迢
2019-02-19
打赏
举报
回复
引用 8 楼 seven_26 的回复:
好了,谢谢各位了
方法想到了,我又加了个点
然后就可以很方便的求出旋转中心了
您好!这个方法如何求解旋转中心,能不能讲一下思路。
syy64
2016-09-14
打赏
举报
回复
还得经过仿射变换,坐标轴的多次平移和旋转,可解决,要费时间。。
长不大的空想者
2016-09-14
打赏
举报
回复
x1-x = cosa*(x2-x)+sina*(y2-y) y1-y = -sina(x2-x)+cosa*(y2-y) 这东西怎么解。。。。。
syy64
2016-09-14
打赏
举报
回复
或利用仿射变换公式来求解。 x1-x = cosa*(x2-x)+sina*(y2-y) y1-y = -sina(x2-x)+cosa*(y2-y) 二元一次方程会解吧。 2楼当时写错了。
长不大的空想者
2016-09-14
打赏
举报
回复
没说的那么简单好吧。。。 等腰三角形两边前提是知道边长,而不知道,其实两边最后只能出一个方程出来 而且我要的是具体点,是x=?,y=?。不是x = ?y+? 。 昨天我也列了几个方程算了下,算了半天没出来 所以我想问问有啥好的方法 或者是否直接有函数,输入一堆旋转后的点,求旋转点
长不大的空想者
2016-09-14
打赏
举报
回复
好了,谢谢各位了
方法想到了,我又加了个点
然后就可以很方便的求出旋转中心了
谁是我的谁的谁
2016-09-13
打赏
举报
回复
你好像以前问过这个问题? 做三维图形的?
syy64
2016-09-13
打赏
举报
回复
或利用仿射变换公式来求解。 x1-x = cosa*(x2-x)+sina*(y2-y) y1-y = -sina(x2-x)+sina*(y2-y) 二元一次方程会解吧。
syy64
2016-09-13
打赏
举报
回复
通过等腰三角型的高,可求两腰的长度,根据距离公式可消元解二元一次方程。
求
旋转
中心
【halcon定位】
求
旋转
中心
【halcon定位】 在以前做项目的时候,最让我头疼之一的属于定位项目,时准时不准的,所以遇到就发虚,知识水平有限,网上资料少,也没人教。后面才知道没有标
旋转
中心
是其中问题之一。 为什么要标
旋转
中心
呢? 首先,我们来了解一下机械手的构造,一个普通的机械抓取端由两部分组成:
旋转
轴和抓取点。实际上我们标定(n点)的时候,得到机械手和图像对应mark点的坐标是抓取坐标, 但是很少有人注意或者是没留意等。 然后,我们来了解机械手抓取动作。机械手抓取执行之前,先要回原点,设为状态O(x,.
当机器人可
旋转
角度很小的时候
求
旋转
中心
其中,(x1, y1)和(x2, y2)是两个不同点的坐标,cx和cy是
旋转
中心
的坐标,theta是
旋转
角度。需要注意的是,如果机器人的
旋转
角度较大,则这种方法可能不太准确,因为机器人不再是一个刚体,而是可能会发生形变。具体来说,假设机器人绕着某个
旋转
中心
旋转
,我们可以选择两个不同的点,并记录它们在
旋转
过程中的位移向量。然后,通过
求
解方程组,可以计算出
旋转
中心
的坐标。如果机器人的
旋转
角度很小,可以近似地将机器人看作一个刚体,在这种情况下,可以通过测量机器人在
旋转
过程中的两个不同点的位移来确定
旋转
中心
。
由
旋转
矩阵
求
旋转
中心
在图像的复合变化过程中,通常会用到Matrix矩阵,一般的过程是先构造仿射变换矩阵,然后对图像进行仿射变换,如:围绕点(100,100)
旋转
30度(sin 30 = 0.5 ,cos 30 = 0.866),则构造过程如下: float f[]= { 0.866F, -0.5F, 63.4F,0.5F, 0.866F,-36.6F,0.0F, 0.0F, 1.0F }; matr
visionpro
求
旋转
中心
,拟合圆心操作
3点拟合方式 /// <summary> /// vpro拟合圆
求
圆心,3点 /// </summary> /// <param name="p1X">点1X</param> /// <param name="p1Y">点1Y</param> /// <param name="p2X">点2X</param>
关于
旋转
中心
的计算以及运用
首先摆上套用公式: x=(x1-x2)cosθ-(y1-y2)sinθ+x2 y=(y1-y2)cosθ+(x1-x2)sinθ+y2 Remark: x2,y2为
旋转
中心
,x1,y1为Mark点坐标,θ为
旋转
角度, x,y为Mark点绕
旋转
中心
旋转
θ角度后的坐标。
旋转
中心
的计算方法: 在机器视觉行业一般采用FitCircle 拟合圆的方式计算得出。或者通过3组或者3组以上坐标算出。 为什么需要用到
旋转
中心
呢? 因为机器人或者机器轴吸取物料时,轴心和产品
中心
不一致,所以转θ角度后的位置需要
旋转
中心
算出来。
图形处理/算法
19,466
社区成员
50,678
社区内容
发帖
与我相关
我的任务
图形处理/算法
VC/MFC 图形处理/算法
复制链接
扫一扫
分享
社区描述
VC/MFC 图形处理/算法
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享