I mentioned above that Reed-Solomon messages can be XOR'ed: if we have two different Reed-Solomon encoded blocks b1 and b2 corresponding to messages m1 and m2, b1 ⊕ b2 is also a Reed-Solomon encoded block; it corresponds to the message m1 ⊕ m2. (In the notation of the previous post, this happens because Reed-Solomon blocks correspond 1:1 with multiples of g(x). Since b1 and b2 are multiples of g(x), their sum is a multiple of g(x) too.) This property means that we can build up a valid Reed-Solomon block from other Reed-Solomon blocks. In particular, we can construct the sequence of blocks b0, b1, b2, ..., where bi is the block whose data bits are all zeros except for bit i and whose error correction bits are then set to correspond to a valid Reed-Solomon block. That set is a basis for the entire vector space of valid Reed-Solomon blocks. Here is the basis matrix for the space of blocks with 2 data bytes and 2 checksum bytes:
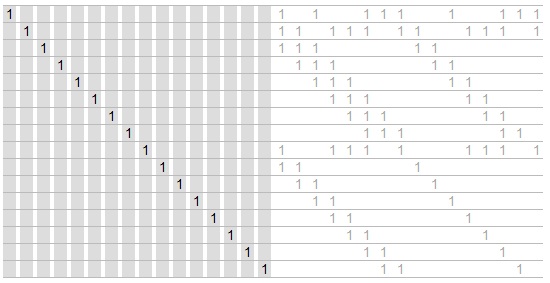
(没有填写的部分都代表比特位为0。灰色部分就是我们可以自己完全控制的比特部分,白色部分则是尾随后面的纠错冗余码。由上面的异或特性我们知道,我们可以将编完码的结果和上面的这组基进行异或,而不改变其他的控制位,并且保持冗余码的更新。)
Q:这里没有填写的部分、灰色部分、白色部分分别是指哪部分?将所罗门编码分散算法又是怎么实现的?
The missing entries are zeros. The gray columns highlight the pixels we have complete control over: there is only one row with a 1 for each of those pixels. Each time we want to change such a pixel, we can XOR our current data with its row to change that pixel, not change any of the other controlled pixels, and keep the error correction bits up to date.
So what, you say. We're still just twiddling data bits. The canvas is the same.
But wait, there's more! The basis we had above lets us change individual data pixels, but we can XOR rows together to create other basis matrices that trade data bits for error correction bits. No matter what, we're not going to increase our flexibility—the number of pixels we have direct control over cannot increase—but we can redistribute that flexibility throughout the image, at the same time smearing the uncooperative noise pixels evenly all over the canvas. This is the same procedure as Gauss-Jordan elimination, the way you turn a matrix into row-reduced echelon form.
This matrix shows the result of trying to assert control over alternating pixels (the gray columns):
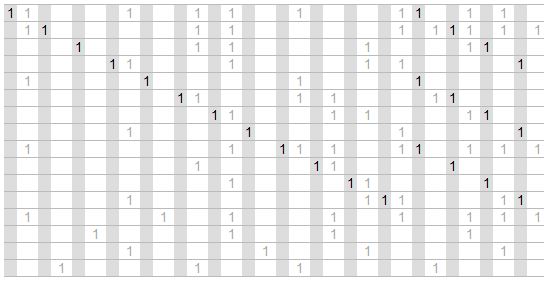
The matrix illustrates an important point about this trick: it's not completely general. The data bits are linearly independent, but there are dependencies between the error correction bits that mean we often can't have every pixel we ask for. In this example, the last four pixels we tried to get were unavailable: our manipulations of the rows to isolate the first four error correction bits zeroed out the last four that we wanted.
In practice, a good approach is to create a list of all the pixels in the Reed-Solomon block sorted by how useful it would be to be able to set that pixel. (Pixels from high-contrast regions of the image are less important than pixels from low-contrast regions.) Then, we can consider each pixel in turn, and if the basis matrix allows it, isolate that pixel. If not, no big deal, we move on to the next pixel.
上面的说的所罗门码可以被XOR,是不是这样理解,
data1=数据1,ecc1=所罗门编码1
data2=数据2,ecc2=所罗门编码2
data1 xor data2等于ecc1 xor ecc2,是这样吗?
然后他上面说是将所罗门编码分散,又是怎么算法,看的不是很明白?


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享




