


27,521
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享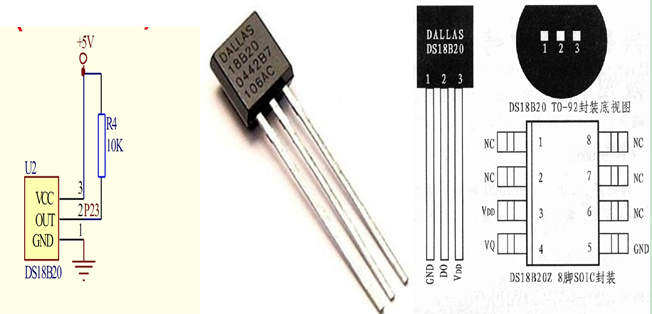
#main.py
import pyb
from pyb import Pin
from ds18x20 import DS18X20
Pin("Y11",Pin.OUT_PP).low()#GND
Pin("Y9",Pin.OUT_PP).high()#VCC
pyb.delay(100)
DQ=DS18X20(Pin('Y10'))#DQ
while True:
tem = DQ.read_temp()
print(tem)
pyb.delay(1000)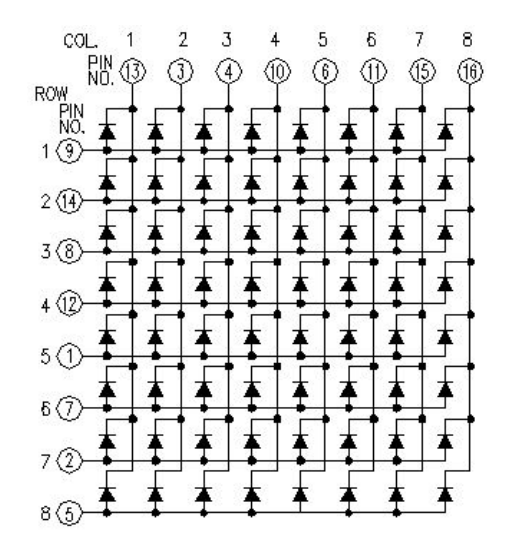
import pyb
from pyb import Pin
from ds18x20 import DS18X20
x_PIN = [Pin(i, Pin.OUT_PP) for i in ['X1','X2','X3','X4','X5','X6','X7','X8']]
y_PIN = [Pin(i, Pin.OUT_PP) for i in ['Y1','Y2','Y3','Y4','Y5','Y6','Y7','Y8']]
temp=['0000,0110,0110,0110,0110,0110,0110,0000','1101,1101,1101,1101,1101,1101,1101,1101,
'0000,1110,1110,0000,0111,0111,0111,0000','0000,1110,1110,0000,1110,1110,1110,0000',
'0101,0101,0101,0000,1101,1101,1101,1101','0000,0111,0111,0000,1110,1110,1110,0000',
'0000,0111,0111,0000,0110,0110,0110,0000','0000,1110,1110,1110,1110,1110,1110,1110',
'0000,0110,0110,0000,0110,0110,0110,0000','0000,0110,0110,0000,1110,1110,1110,0000']
tempValue=0
def show(l_num,r_num):
flag=0
for x_ in range(0,8):
for x_ in range(0,8):
if x_!=flag:
x_PIN[x_].value(0)
left_ = temp[l_num]
left_item=left_.split(',')
right_ = temp[r_num]
right_item=right_.split(',')
li_l=left_item[flag]
li_r=right_item[flag]
y_PIN[0].value(int(li_l[:1]))
y_PIN[1].value(int(li_l[1:2]))
y_PIN[2].value(int(li_l[2:3]))
y_PIN[3].value(int(li_l[3:4]))
y_PIN[4].value(int(li_r[:1]))
y_PIN[5].value(int(li_r[1:2]))
y_PIN[6].value(int(li_r[2:3]))
y_PIN[7].value(int(li_r[3:4]))
x_PIN[flag].value(1)
flag=flag+1
pyb.delay(2)
def display(time_,l_num,r_num):
for x in range(0,time_):
for y in range(0,110):
show(l_num,r_num)
if __name__=='__main__':
#time_t=Timer(4,freq=5,callback=randSensor)
DQ=DS18X20(Pin('Y10'))#DQ
while 1:
tempValue =int(DQ.read_temp())
print(tempValue)
l_n=tempValue//10
r_n=tempValue%10
print(l_n)
print(r_n)
display(60,l_n,r_n)
for i in x_PIN:
i.value(0)
