


27,521
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
import pyb
xlights = (pyb.LED(2), pyb.LED(3))
ylights = (pyb.LED(1), pyb.LED(4))
from pyb import UART
from pyb import Pin
#from ubinascii import hexlify
from ubinascii import *
accel = pyb.Accel()
u2 = UART(2, 9600)
i=0
K=1 print('while')
while (K>0):
_dataRead=u2.readall()
if(1>0):
x = accel.x()
print("x=")
print(x)
if x > 10:
xlights[0].on()
xlights[1].off()
u2.write('\x00\x05\x18YOU')
#pyb.delay(1000)
print('\x00\x01\x18YOU')
elif x < -10:
xlights[1].on()
xlights[0].off()
u2.write('\x00\x05\x18ZUO')
print('\x00\x01\x18ZUO')
#pyb.delay(1000)
else:
xlights[0].off()
xlights[1].off()
y = accel.y()
print("y=")
print(y)
if y > 15:
ylights[0].on()
ylights[1].off()
#u2.write('\x00\x05\x18HOU')
#pyb.delay(1000)
#print('\x00\x01\x18HOU')
elif y < -15:
ylights[1].on()
ylights[0].off()
u2.write('\x00\x05\x18QIAN')
#pyb.delay(1000)
print('\x00\x01\x18QIAN')
else:
ylights[0].off()
ylights[1].off()
pyb.delay(10)import pyb
from pyb import UART
from pyb import Pin
from ubinascii import hexlify
from ubinascii import *
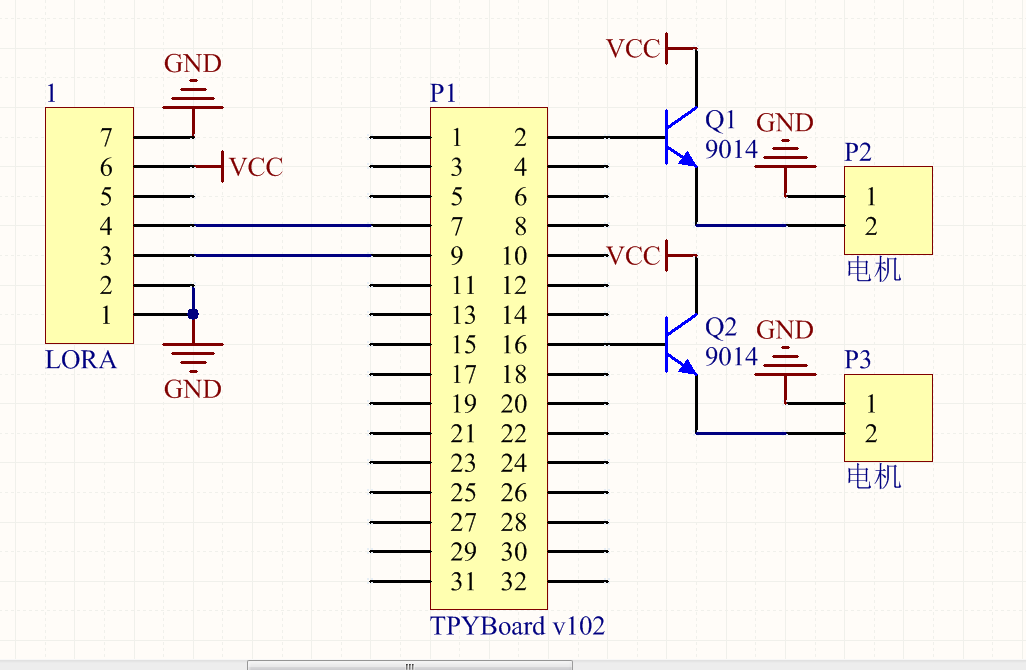
M1 = Pin('X1', Pin.OUT_PP)
M3 = Pin('Y1', Pin.OUT_PP)
u2 = UART(2, 9600)
i=0
K=1print('while')
while (K>0):
M1.high()
pyb.delay(3)
M3.high()
if(u2.any()>0):
print('1234')
M1.low()
M3.low()
pyb.delay(3)
_dataRead=u2.readall()
print('123',_dataRead)
if(_dataRead.find(b'QIAN')>-1):
M1.low()
M3.low()
print('QIAN')
pyb.delay(250)
elif(_dataRead.find(b'ZUO')>-1):
M1.low()
M3.high()
print('ZUO')
pyb.delay(250)
elif(_dataRead.find(b'YOU')>-1):
M1.high()
M3.low()
print('ZUO')
pyb.delay(250)



 不错啊
不错啊