社区
单片机/工控
帖子详情
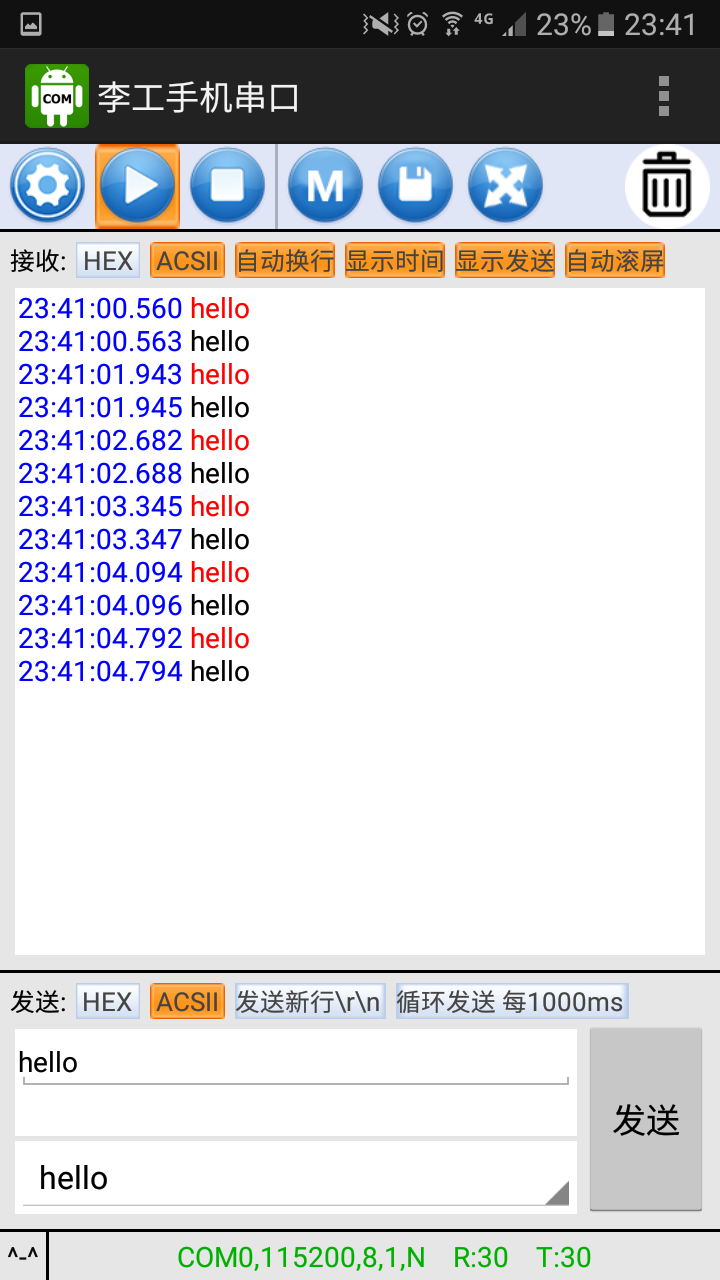
使用USB转串口与手机APP进行通信
qq_31124369
2016-11-16 11:30:31
使用USB转串口与手机APP进行通信,把数据导入手机。可是除了在固件和APP上运行的时间,每包数据的传输中有十几毫秒的时间不知道去哪里了,所以速度很慢!!!
有会这个的吗??知道怎么解决吗??
...全文
1975
4
打赏
收藏
使用USB转串口与手机APP进行通信
使用USB转串口与手机APP进行通信,把数据导入手机。可是除了在固件和APP上运行的时间,每包数据的传输中有十几毫秒的时间不知道去哪里了,所以速度很慢!!! 有会这个的吗??知道怎么解决吗??
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
4 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
心有灵犀~
2020-04-29
打赏
举报
回复
你好,我想问下usb和手机app通信,这个流程是如何实现的,在校学生小白求助
李工电子说
2018-09-11
打赏
举报
回复
嗯嗯,就这个了
zgl7903
2016-12-01
打赏
举报
回复
USB 转串口的,一般为减少USB带宽使用量,会有一个延迟计时器, 超过这个计时时间没有数据 认为帧结束,才会打包发送给系统, 设备管理器 在串口高级属性中 一般可以调整这个参数, 试试把延迟调到最小值
qq_31124369
2016-11-16
打赏
举报
回复
有大神在吗?自己顶一个
USB
转
串口
资料
USB
转
串口
资料
安卓源码 Android 沁恒
USB
转
串口
芯片 CH340
通信
程序
安卓接CH340实现
串口
通信
源码,可设置波特率等参数
ucos2重写stm32标准库的
usb
转
串口
demo
因为stm32的
usb
转
串口
demo的枚举过程是基于状态的,分析起来不明了,改为基于ucos2的基于过程,代码直接明了 分析起来
android
手机
OTG功能调试
usb
串口
的demo程序
android
手机
使用
otg功能调试
usb
串口
的demo程序,4.4系统亲测可用,程序前提是
手机
支持OTG功能
USB
调试助手(单片机多功能调试助手)
USB
(单片机多功能调试助手)(单片机多功能调试助手)(单片机多功能调试助手)(单片机多功能调试助手)
单片机/工控
27,518
社区成员
28,799
社区内容
发帖
与我相关
我的任务
单片机/工控
硬件/嵌入开发 单片机/工控
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 单片机/工控
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

 嗯嗯,就这个了
嗯嗯,就这个了


