[quote=引用 4 楼 wangfan027 的回复:] 是的,这东西很灵活的, 如果要正转, 你也可以 xIn1=1, xIn2=1-PWM 或者 xin1=PWM, xin2=0 即使你方向弄反了,你再把电机接线反过来就对了
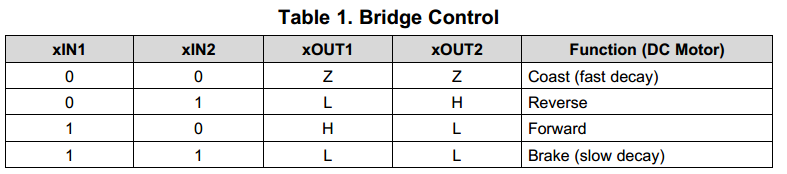
重新前进时,是直接给前进的状态, coast 滑动 是失控状态 少用。 break 制动 ,是电机短接 制动,如果 break 制动 没完,直接给运动(正反向)有可能使电机进入 反接制动状态。
coast 滑动, 即 电机 失电(桥输出 高阻 ,不通),fast decay 快 衰减 , 时常数 L/R(大) 小,电流衰减 快。 break 制动 ,即 电机 短接(桥输出 低阻,短接) ,slow decay 慢 衰减。时常数 L/R(小) 大,电流衰减 慢。
是的,这东西很灵活的, 如果要正转, 你也可以 xIn1=1, xIn2=1-PWM 或者 xin1=PWM, xin2=0 即使你方向弄反了,你再把电机接线反过来就对了
brake就是刹车,在这个状态电机会立即停止 而coast则可以理解为释放,空挡,如果转动的电机进入这个状态,则会失去动力,因为惯性的原因仍会向前转一点,和brake不一样
27,521
社区成员
28,799
社区内容
加载中
试试用AI创作助手写篇文章吧


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享





