22,297
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
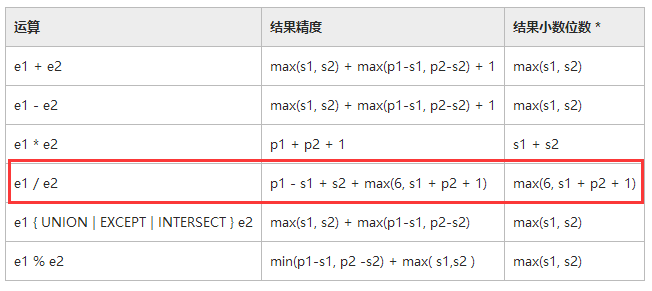
SELECT CONVERT(NUMERIC(38,10), 1.0/3.0)
--0.3333330000
SELECT CONVERT(REAL,1.0/3)
--0.333333
SELECT CAST(CAST(1 AS DECIMAL)/CAST(3 AS DECIMAL) AS DECIMAL(18,6))
--0.333333


CAST(1.0 AS decimal(18,8))