航拍图像配准,拼接
 屋卡 2017-02-24 05:31:48
屋卡 2017-02-24 05:31:48 我做一个关于航拍图像拼接的项目,提供的一组图像集中,每幅图像都有对应的位姿信息(从机载GPS和惯性导航单元获得无人机航拍时的坐标和姿态角),类似前两幅图信息如下:
#image/照片ID,time/时间,latitude/纬度,longitude/经度,altitude/高程,roll/滚转,pitch/俯仰,yaw/航向
1,2016/11/30 11:31,34.37583,112.83631,746.12,0.5,0.1,81.3
2,2016/11/30 11:31,34.37582,112.83741,744.66,-0.1,3.1,79.5
项目要求将这些图像拼接在一起得到全景图像。
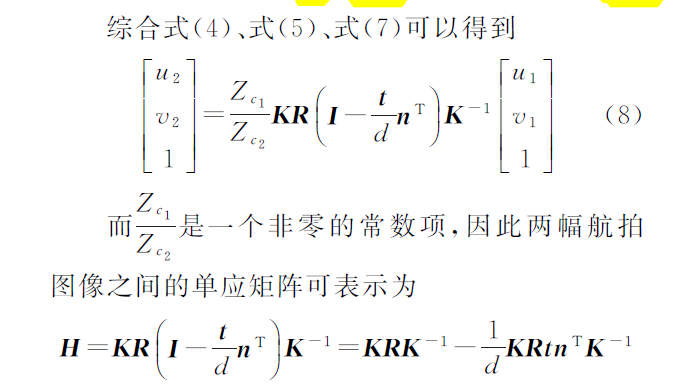
我的做法是通过单应变换矩阵的运算得到拼接图像之间的配准,最后完成多幅图像的拼接得到整个区域的全景图。
单应变换矩阵我都推通了,但是图像像素点总是匹配不上去,误差太大。
想问下做过类似问题的博友,这里的6个旋转,平移量有什么要求嘛,像如我提供的这样,单位是不要化成毫米?
对于相机的内参矩阵,我直接用exif查询对应信息得到[ ],这样可行吗?
还有什么地方应该值得注意呢




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享