社区
界面
帖子详情
请教:雷达界面开发建议。不胜感激
laokaizhao
2017-04-19 04:12:46
最近项目遇到下列问题,请教大家:
1、扫描波束5s一圈,使用双缓冲,仍有闪烁;
2、所有图像,包括背景,点,线等都是画上去的,效率有点低,大概40ms每帧;
3、如果想把界面做的漂亮些,类似以下图片格式,请问有什么好的界面开发库;或者只能换其他编程平台?
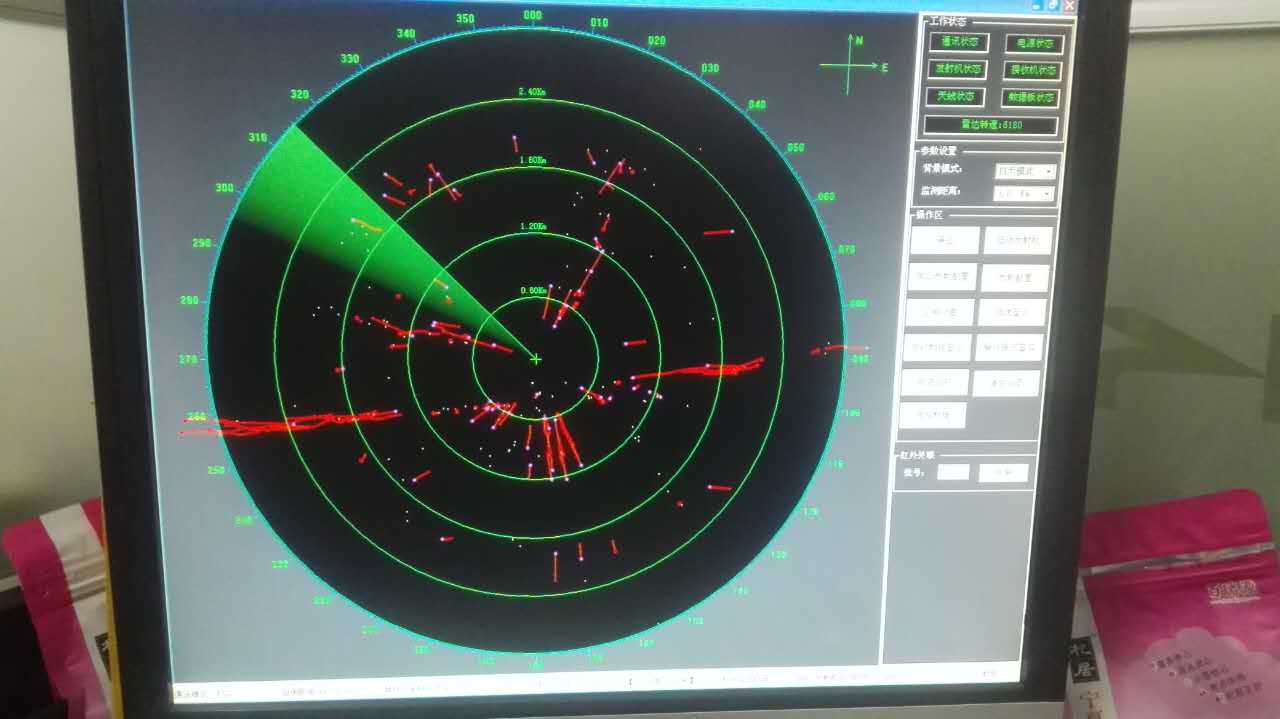
我们现在的软件界面:
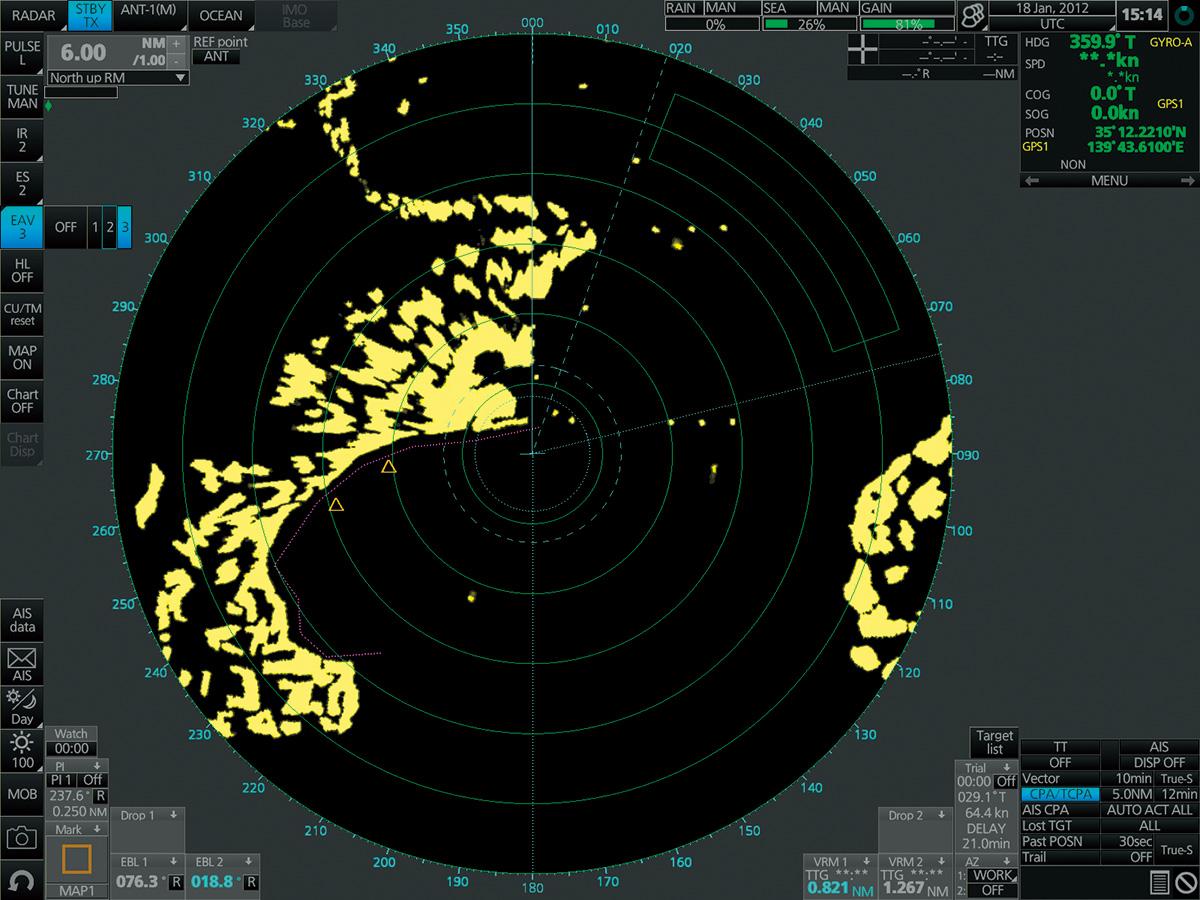
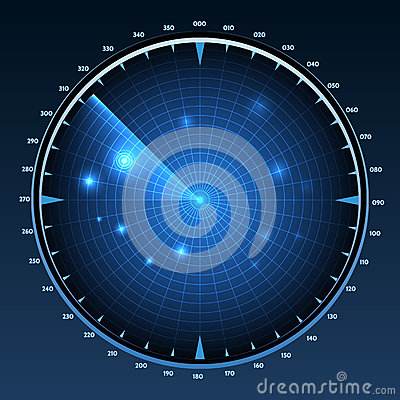
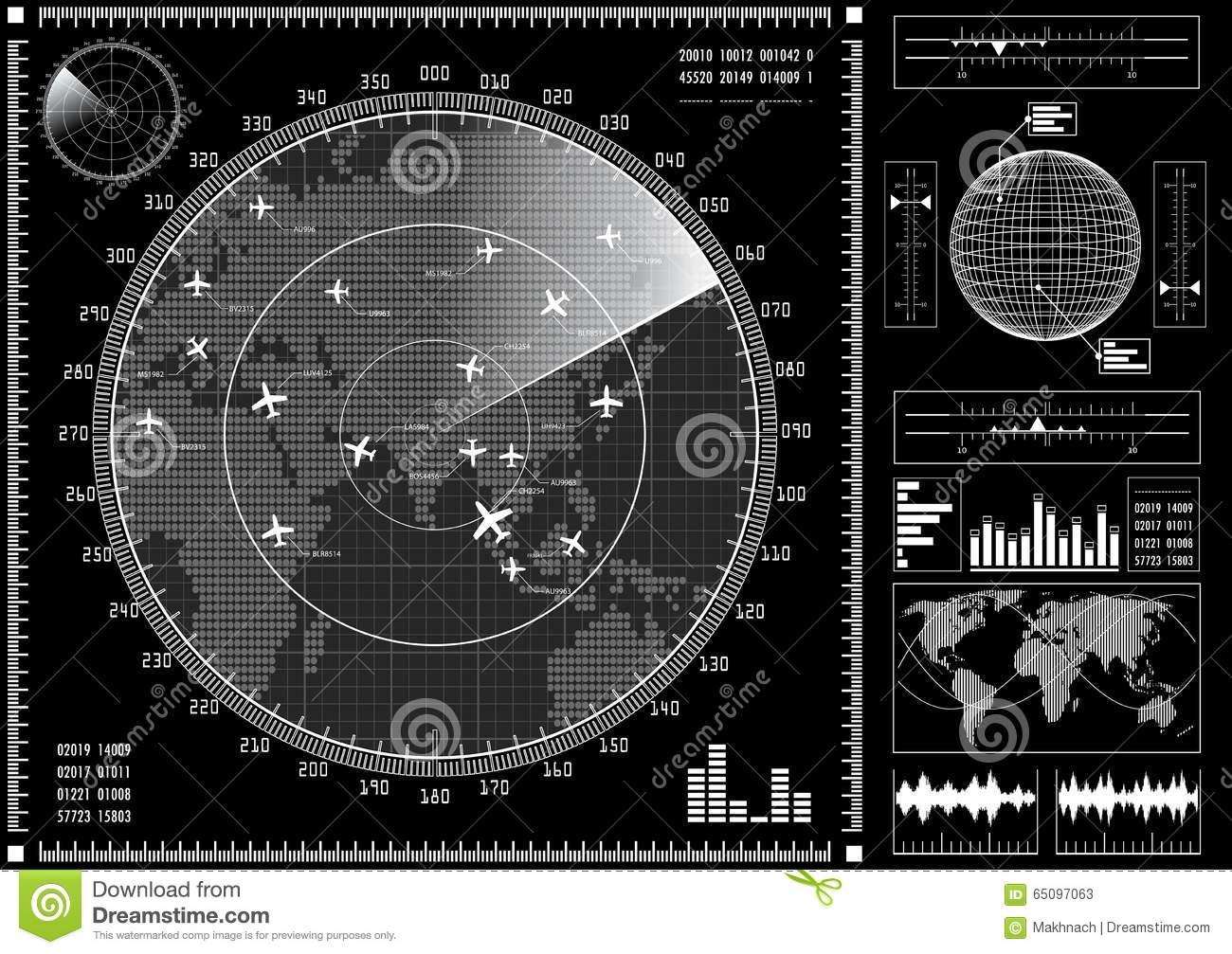
理想的软件界面:
多谢!
...全文
2115
10
打赏
收藏
请教:雷达界面开发建议。不胜感激
最近项目遇到下列问题,请教大家: 1、扫描波束5s一圈,使用双缓冲,仍有闪烁; 2、所有图像,包括背景,点,线等都是画上去的,效率有点低,大概40ms每帧; 3、如果想把界面做的漂亮些,类似以下图片格式,请问有什么好的界面开发库;或者只能换其他编程平台? 我们现在的软件界面: 理想的软件界面: 多谢!
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
10 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
m0_49913709
2020-12-02
打赏
举报
回复
老哥,我最近也在学习用QT学雷达界面,可以学习一下您的代码不哇
gz_qmc
2017-07-18
打赏
举报
回复
哥来给你补刀 首先,哥给的例子只是例子例子给你说明了实现原理,但仅仅限于原理,原理是不变的 其次,你的需求效果简单的搬代码是不行的,因为量变可以引起质变 如果单独在一个黑屏幕或者单一背景上或透明,10000个点一个点一个点画,普通电脑看不出问题 但如果背景变动频繁复杂,可能就变成1万万个点,问题就来了 那么,为了平滑,很多画的过程就要精打细算,比如,有的画就开辟很多内存,一次性先画好, 动态过程就不在画了,而是单纯的透明拷贝 这就是牺牲内存换取速度的道理 这就是一个熟悉的过程,按合理分类建立一系列合适的数据结构来承载自己的图形图像 然后就有合理的算法实现最快速度的回放,自然效果棒棒的 而经验就是多试得来,因此急功近利者永远不可能驾驭 可笑的是他们还以为是技术有难度而从来不反思自己的问题
知识和技能永远没有难易之分,只是人与人有区分
cdcjk
2017-07-08
打赏
举报
回复
直接获取windows DC, 然后调用绘制函数
sichuanwww
2017-07-08
打赏
举报
回复
直接获取windows DC, 然后调用绘制函数
bluesen
2017-07-07
打赏
举报
回复
看来我国的军事科技还是落后啊
赵4老师
2017-07-07
打赏
举报
回复
百度搜相关关键字。
xiaohuh421
2017-07-07
打赏
举报
回复
不要用invalidte, 你就会发现基本不闪烁了. 有很多朋友问, 为什么用了双缓冲, 还是要闪烁呢? 根本原因就是这个东西invalidate相关的函数, 它会导致MFC窗口背景重绘和前景重绘. 但最坑的就是这两个东西, 是两次绘制的. 所以, 一旦背景不是透明的, 前景绘制有稍有那么一点点耗时, 人眼就会分辨出两次绘制, 就是闪烁了. 解决办法有两种 1. 不绘制背景, 或者让其透明 2. 不调用invalidate相关函数, 而是当需要绘制时, 直接在窗口上绘图, 不经过OnPaint. (直接获取windows DC, 然后调用绘制函数) 建议第二种方案
gz_qmc
2017-07-06
打赏
举报
回复
作者的程序怎么这么眼熟啊
叶恭介叶恭介
2017-04-20
打赏
举报
回复
背景,圆圈,刻度这些不变的先绘制好时缓存的CDC,真正绘制的时候,只会在画点那里浪费时候而已,背景,圆圈,刻度直接拷贝
zgl7903
2017-04-20
打赏
举报
回复
高效的 推荐 DirectX OpenGL 等硬件加速
ARS大陆毫米波
雷达
ROS
开发
包解析及二次
开发
(二)
文章目录预备知识与前期工作ARS_40X源码架构
雷达
数据格式及流向数据流向图
雷达
数据格式socket_can通信格式(以
雷达
配置帧通信为例)关键数据介绍及格式说明cluster数据帧can_messages关键参数:topic与服务SubscriptionServices关键类与继承关系二次
开发
流程展示:TODO下一步工作 预备知识与前期工作 最近阅读了前段时间刚部署到电脑上的源码,作者的源码是基于c++的,最近穿插着复习c++并完成了
雷达
的源码阅读,对源码关键部分进行了注释,增加了
毫米波
雷达
系列(五):4D成像毫米波
雷达
、一般毫米波
雷达
、激光
雷达
的优劣势对比
简要分析4D成像毫米波
雷达
相对于一般毫米波
雷达
和激光
雷达
的优劣势,以及结合场景,提供一些选型的初步
建议
。
最完整的毫米波
雷达
ROS开源包解析及二次
开发
(三)
帮助大家进行大陆毫米波
雷达
的ROS源码进行深层阅读,以及二次
开发
学习资料 | TI毫米波
雷达
学习网站汇总(
雷达
初学者必须要知道)
本文编辑:@调皮连续波,保持关注调皮哥,获得更多学习内容和
建议
! 大家好,我是调皮哥!依稀还记得当初自己学习毫米波
雷达
的时候,走了很多弯路,导致自己浪费了很多时间,学了毫米波
雷达
很久都没有入门。现在回过头来,想告诉大家一个秘密,其实很多
雷达
基础的学习资料其实是开源的,我个人觉得有几个原因导致我们难以入门。 (1)不知道存在开源的学习资料 (2)不知道在哪里可以找到 (3)初学者暂且没有全局意识和大局观 说实话,调皮哥个人觉得FMCW毫米波
雷达
基础其实是比较简单的,只是因为学习的时候找不到方向感、没有人带、没
QT
雷达
显示
界面
资源文件介绍
QT
雷达
显示
界面
资源文件介绍 去发现同类优质开源项目:https://gitcode.com/ 资源文件概述 本仓库提供了一个名为“QT
雷达
显示
界面
”的资源文件,该文件具有一定的参考价值,特别适用于需要
开发
基于QT的
雷达
显示
界面
的
开发
者。资源文件中包含了串口通信的相关函数,并且已经针对QT 5.5.1版本进行了优化。此外,该资源文件在Ubuntu 15.10系统上进行了测试和验证。 主要功能 串...
界面
15,976
社区成员
115,866
社区内容
发帖
与我相关
我的任务
界面
VC/MFC 界面
复制链接
扫一扫
分享
社区描述
VC/MFC 界面
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

 直接获取windows DC, 然后调用绘制函数
直接获取windows DC, 然后调用绘制函数




