社区
Android
帖子详情
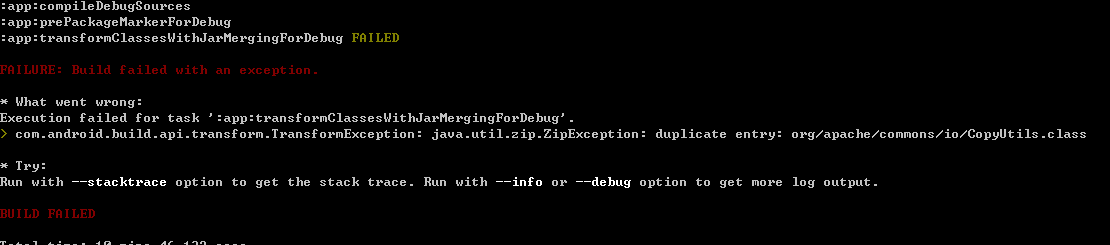
关于react native打包问题,同样的项目同样的nodemodules我打包98%报这个错
dpq444850511
2017-06-13 09:31:51
...全文
325
回复
打赏
收藏
关于react native打包问题,同样的项目同样的nodemodules我打包98%报这个错
[图片]
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
React
-
Native
项目
打包
(iOS/Android)
1. Android
打包
第一步:生成Android签名证书 签名APK需要一个证书用于为APP签名,生成签名证书可以Android Studio以可视化的方式生成,也可以使用终端采用命令行的方式生成。 第二步:设置gradle变量 1.将你的签名证书copy到 android/app目录下。 2.编辑~/.gradle/gradle. properties或../android/gra
React
Native
之
打包
用
React
Native
开发好APP之后,如何将APP发布到市场以供用户使用呢?不管是Android还是ios等原生app走的都是:签名
打包
—>发布到各store这两大步骤。本文将对Android和ios两大平台
打包
过程做一个简单的介绍。Android平台
打包
在Android原生的app开发
打包
过程中,主要有两种发布方式:一种是借助于命令行操作,另外一种是借助于Android Studio进行发布
React
Native
项目
打包
离线安卓apk
文章目录
React
Native
项目
打包
安卓apk1、生成签名秘钥1):执行生成命令2):填写区域及作者信息3):秘钥生成完成会有一个my-release-key.keystore的密钥库文件2、配置gradle全局变量3、给自己的RN
项目
配置签名1): 将签名文件my-release-key.keystore放在、
react
native
项目
的android\app下。2):编辑android/...
react
-
native
打包
Android应用
react
-
native
打包
Android应用
React
-
Native
编译
打包
遇到的坑
费尽千辛万苦终于把RN的东西集成到自己的
项目
里去,打算
打包
上线,但是在使用gradle
打包
的过程中,碰到各种奇葩
问题
,明明自己的操作都是按着官网操作(
React
-
Native
项目
打包
),但是还是出现
问题
,然后费劲脑汁,终于把遇到的各种
问题
解决。 总结一下,在
React
-
Native
项目
打包
过程中。 首先,按着正常操作配置自己
项目
的.keystore信息在build.gradle中(此步骤不做详细
Android
80,490
社区成员
91,374
社区内容
发帖
与我相关
我的任务
Android
移动平台 Android
复制链接
扫一扫
分享
社区描述
移动平台 Android
android
android-studio
androidx
技术论坛(原bbs)
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

