社区
C#
帖子详情
halcon单个面阵相机标定
qq_35189603
2017-07-13 11:08:30
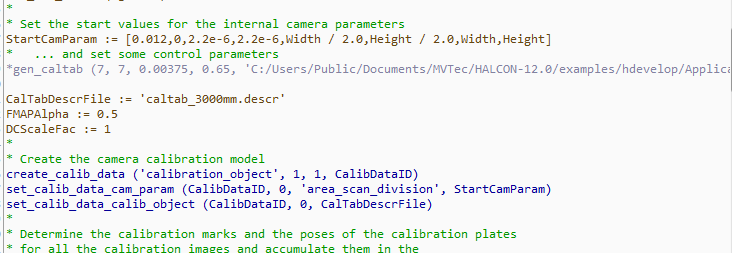
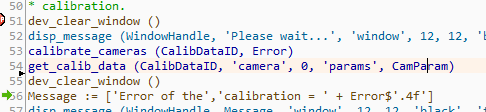
标点过后相机获取内部参数CamParam里面的焦距变化好大
...全文
400
1
打赏
收藏
halcon单个面阵相机标定
标点过后相机获取内部参数CamParam里面的焦距变化好大
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
1 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
qq_35189603
2017-07-13
打赏
举报
回复
现在是0.0348
深入理解
halcon
相机标定
本文详细介绍了使用
Halcon
进行
相机标定
的过程,包括相机内外参数的解释、标定板的制作与使用、标定步骤及代码示例,旨在帮助读者理解和掌握
相机标定
的技术细节。
相机标定
(3)---基于
halcon
的
面阵
相机标定
本文介绍基于
Halcon
的
面阵
相机标定
。阐述了相机外参、内参的概念及参数含义,说明了标定板的尺寸和制作方法。给出了标定的具体步骤,包括制作标定板、定义内参初始值、通过标定助手或程序实现标定,还提及转化世界坐标、确定原点等内容,并提供了相关网址和代码示例。
简要
Halcon
相机标定
本文详细介绍
Halcon
软件中
相机标定
的过程与方法,涵盖标定板制作、模型创建、参数设置、标定计算及参数保存等关键步骤,旨在矫正畸变并提高测量精度。
Halcon
标定板标定流程
本文介绍
Halcon
标定板标定流程,包括相机内参和外参标定。内参标定目的是消除镜头畸变,通过查阅手册获取部分参数,填入初始内参,利用算子设置,标定后计算出畸变系数。外参标定决定摄像机与世界坐标系相对位置,求解产品相对于相机的位姿,实现像素与世界坐标系点的转化。
HALCON
相机标定
相机内参相机外参
本文详细介绍如何使用
Halcon
进行相机内外参数标定,包括硬件搭建、标定板参数生成、标定流程及图像畸变矫正等关键步骤。
C#
111,129
社区成员
642,534
社区内容
发帖
与我相关
我的任务
C#
.NET技术 C#
复制链接
扫一扫
分享
社区描述
.NET技术 C#
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
让您成为最强悍的C#开发者
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享


