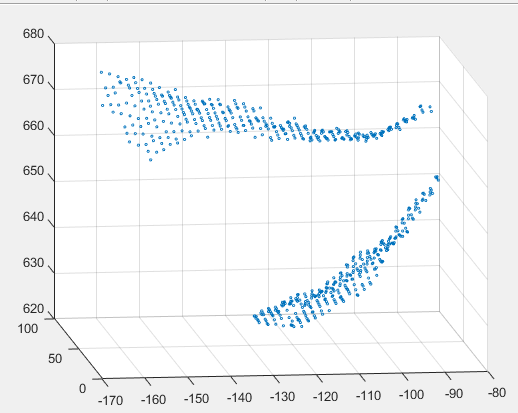
我用了K-means聚类效果不好,一个集团的和另外一个集团的另外一部分都被识别出来了。。。。。。 and,李四老师那个东西真的看不懂~~
3,881
社区成员
9,044
社区内容
加载中
试试用AI创作助手写篇文章吧




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享