社区
数据结构与算法
帖子详情
求旋转中心算法!
weixin_39556523
2018-03-03 08:10:28
一个圆规在平面上,已知旋转一个锐角的角度a,已知旋转角度a前后坐标,
旋转前(X1,Y1),旋转后(X2,Y2), X1,Y1,X2,Y2均大于0 ,求圆规旋转中心坐标(X,Y)?
感觉这样求一个解的公式出来很困难!
...全文
7109
16
打赏
收藏
求旋转中心算法!
一个圆规在平面上,已知旋转一个锐角的角度a,已知旋转角度a前后坐标, 旋转前(X1,Y1),旋转后(X2,Y2), X1,Y1,X2,Y2均大于0 ,求圆规旋转中心坐标(X,Y)? 感觉这样求一个解的公式出来很困难!
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
16 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
示申○言舌
2020-12-16
打赏
举报
回复
假设从A旋转到B,求出A点到B点线段的中点C,然后A到B看作向量,求过C点且垂直于AB的向量,长度为圆的半径。OVER
Minikinfish
2020-12-11
打赏
举报
回复
利用向量来思考, v1 = (x1-x, y1-y) v2 = (x2-x, y2-y) 向量v1旋转a角度到向量v2公式(根据旋转矩阵推导出) v2.x = v1.x * cosa - v1.y * sina v2.y = v1.x * sina + v1.x * cosa => 很简单整理出二元一次方程组,求解。
weixin_42095351
2020-11-29
打赏
举报
回复
https://blog.csdn.net/faithmy509/article/details/80235631?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromBaidu-1.control&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromBaidu-1.control
zxh4444
2020-11-13
打赏
举报
回复
感觉7楼的没有问题啊
qq_32806331
2019-11-25
打赏
举报
回复
换一种思路 就是拟合圆的算法
angel6709
2019-07-22
打赏
举报
回复
pcyao2011
2019-05-24
打赏
举报
回复
第1点在4象限、2点在1象限时公式有问题的。
idealguy
2018-10-04
打赏
举报
回复
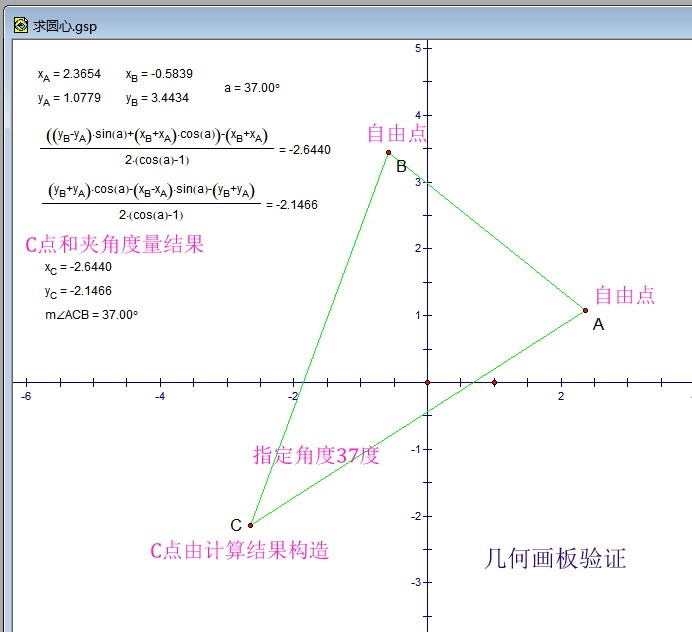
本算法不限于第一象限。如果夹角<180度,则圆心C位于向量AB的左侧。
idealguy
2018-10-03
打赏
举报
回复
续楼上帖子。
几何画板验证结果
idealguy
2018-10-03
打赏
举报
回复
圆满解决:
Yofoo
2018-09-28
打赏
举报
回复
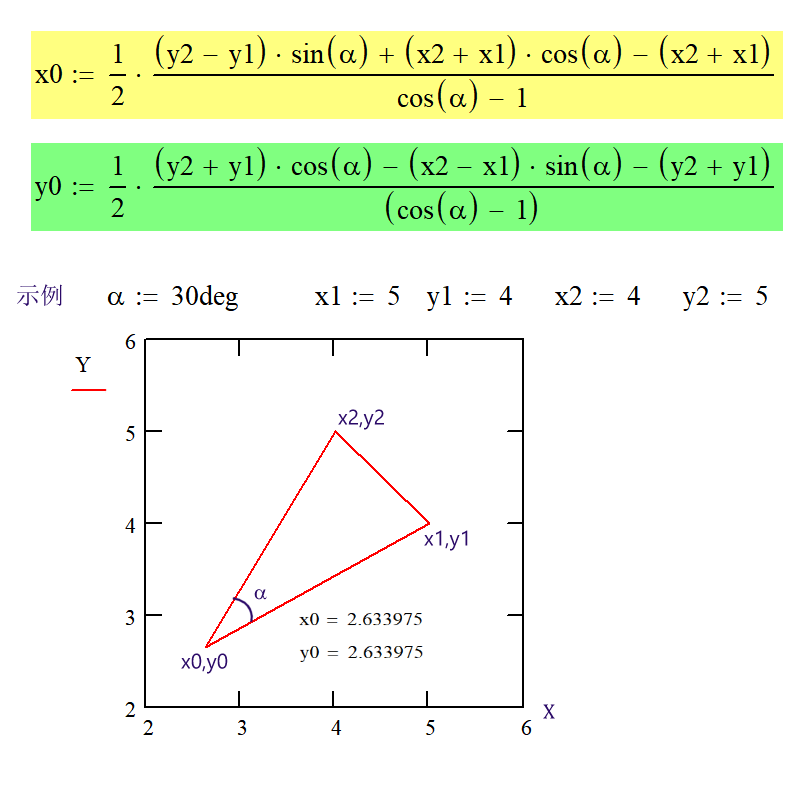
有个公式少了个括号, 改下再用工具试下就对了
Yofoo
2018-09-28
打赏
举报
回复
方程解出来很复杂, 可以用工具
角度 t
坐标(a,b) (c,d)
求x,y
方程:
(x-a)*(x-a)+(y-b)*(y-b) = (x-c)*(x-c)+(y-d)*(y-d)
(x-a)*(x-a)+(y-b)*(y-b) * sin(t/2)*sin(t/2) = ((a-c)*(a-c)+(b-d)*(b-d))/4
结果为
x=(d*(b*(2*sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)+a*(2*sin(t/2)^2-4))-2*b*c*sin(t/2)^2)+d^2*((-sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2))+c*sin(t/2)^2+a*(2-sin(t/2)^2))+b^2*(a*(2-sin(t/2)^2)-sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2))+c*(b^2*sin(t/2)^2-a^2*sin(t/2)^2)+c^3*sin(t/2)^2-a*c^2*sin(t/2)^2+a^3*sin(t/2)^2)/(2*c^2*sin(t/2)^2-4*a*c*sin(t/2)^2+2*a^2*sin(t/2)^2+2*d^2-4*b*d+2*b^2),
y=(d*(c*(sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)-2*a)-a*sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)+c^2-b^2+a^2)+b*(a*sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)+a^2*(2*sin(t/2)^2-1))+b*c*(a*(2-4*sin(t/2)^2)-sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2))+b*c^2*(2*sin(t/2)^2-1)+d^3-b*d^2+b^3)/(2*c^2*sin(t/2)^2-4*a*c*sin(t/2)^2+2*a^2*sin(t/2)^2+2*d^2-4*b*d+2*b^2),x=(d*(b*(a*(2*sin(t/2)^2-4)-2*sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2))-2*b*c*sin(t/2)^2)+d^2*(sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)+c*sin(t/2)^2+a*(2-sin(t/2)^2))+b^2*(sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)+a*(2-sin(t/2)^2))+c*(b^2*sin(t/2)^2-a^2*sin(t/2)^2)+c^3*sin(t/2)^2-a*c^2*sin(t/2)^2+a^3*sin(t/2)^2)/(2*c^2*sin(t/2)^2-4*a*c*sin(t/2)^2+2*a^2*sin(t/2)^2+2*d^2-4*b*d+2*b^2),y=(d*(c*((-sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2))-2*a)+a*sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)+c^2-b^2+a^2)+b*(a^2*(2*sin(t/2)^2-1)-a*sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2))+b*c*(sqrt(d^2-2*b*d+c^2-2*a*c+b^2+a^2)*sqrt(1-sin(t/2)^2)+a*(2-4*sin(t/2)^2))+b*c^2*(2*sin(t/2)^2-1)+d^3-b*d^2+b^3)/(2*c^2*sin(t/2)^2-4*a*c*sin(t/2)^2+2*a^2*sin(t/2)^2+2*d^2-4*b*d+2*b^2)
这个结果为工具自动计算
地址: https://zh.numberempire.com/equationsolver.php
真相重于对错
2018-05-18
打赏
举报
回复
https://baike.baidu.com/item/%E6%97%8B%E8%BD%AC%E7%9F%A9%E9%98%B5/3265181?fr=aladdin
angel6709
2018-05-11
打赏
举报
回复
基础数学问题啊
tanta
2018-03-09
打赏
举报
回复
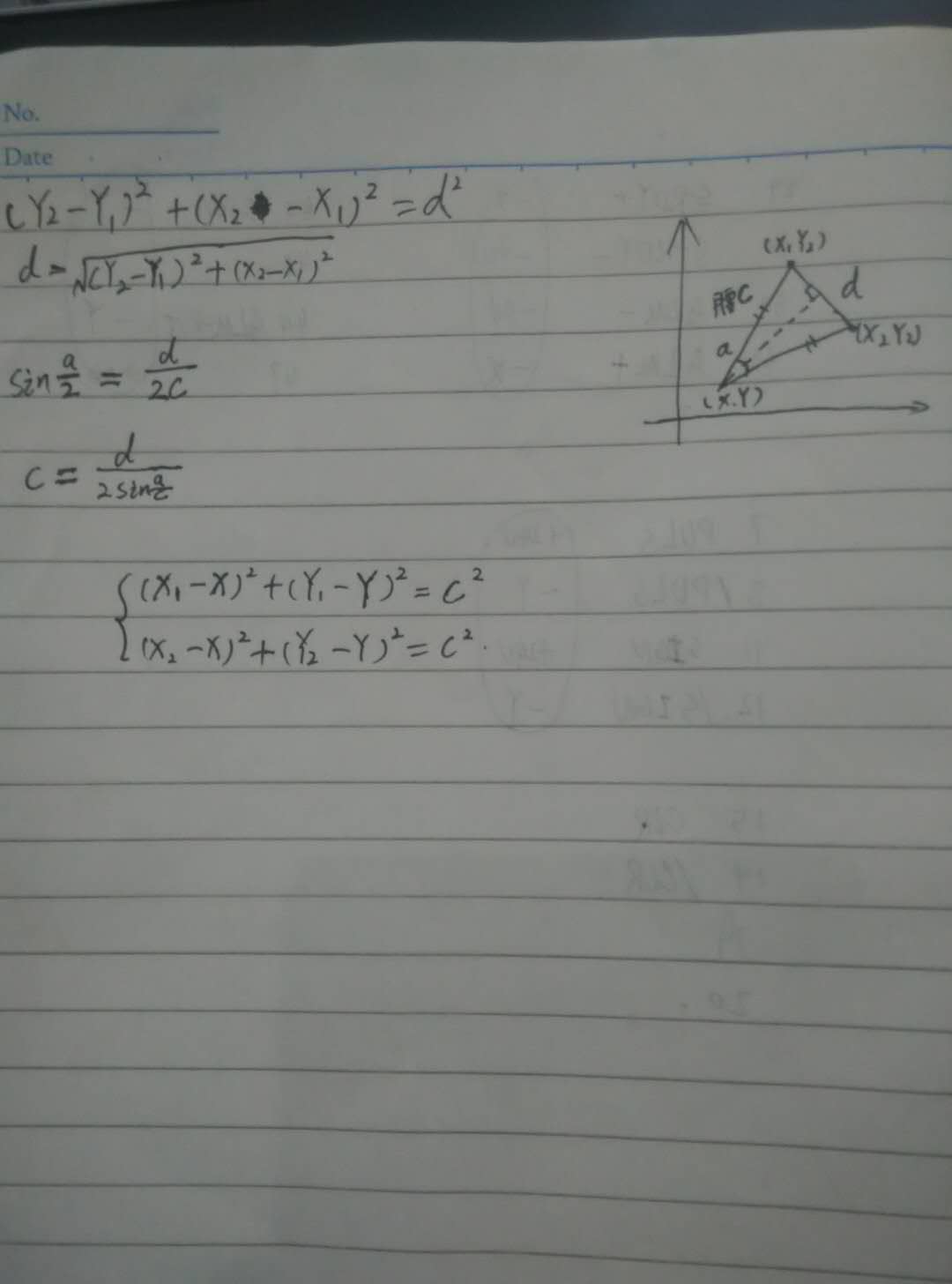
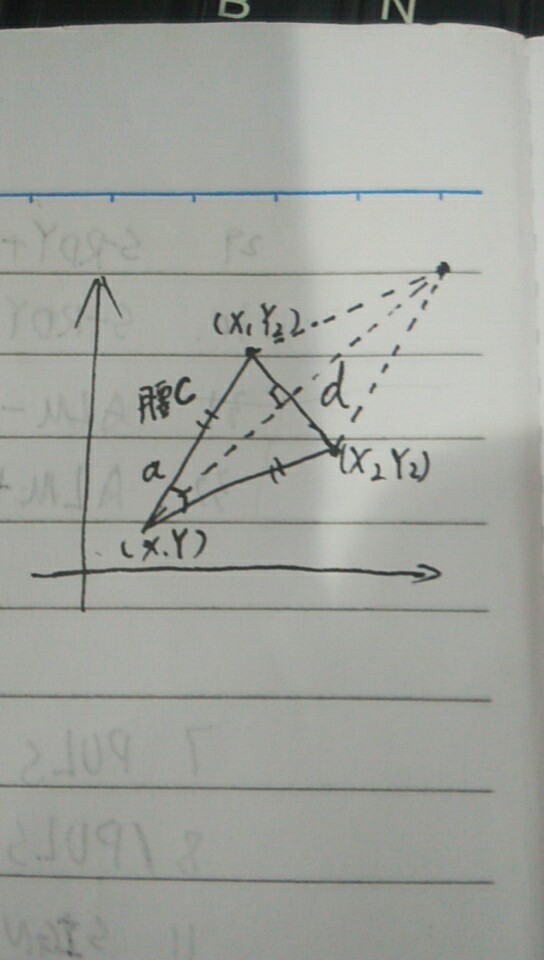
别用勾股定理。这个图中所有角都可以求出来,所有的长度也都可以求出来,用三角函数求不复杂
机器视觉——
旋转
中心
的标定
旋转
中心
的计算和使用 1. 为什么要标定
旋转
中心
2. 如何标定
旋转
中心
2.1 标定
旋转
中心
的操作步骤 2.2 三点拟合圆心代码: 3. halcon多点拟合圆的方法 4. 如何使用
旋转
中心
计算偏移量 5. 计算一点绕另一点
旋转
一定角度后新点的坐标
canvas中矩形围绕左上角
旋转
后
求
矩形
中心
的
算法
近日,由于业务需
求
,我做了一个小
算法
,就是关于图片
旋转
后的定位问题。 canvas中画的图,
旋转
中心
是左上角,name已知
旋转
的度数怎么
求
旋转
后的矩形
中心
点坐标呢?? 当然这一切都是基于JavaScript来做的逻辑运算。 如图所示,已知A点坐标(),
旋转
角度θ,矩形宽高,
求
出矩形
旋转
后E点的坐标。 思路: 已知AB、BC的长度,矩形对角线夹角∠BAC即α度数可以
求
出来; 通过勾股定理,可以
求
出AE的长度; 再根据正余弦定理,可以分别
求
出AD,DE的长度; 最后,根据A点坐标可以算.
九点标定和
旋转
中心
标定后
旋转
点的计算
九点标定:将像素坐标转为物理世界坐标 走九宫格,间隔适中
旋转
中心
标定:获得
旋转
中心
旋转
6个点,间隔5-7°
halocn标定找
旋转
中心
_一种利用
旋转
中心
进行手眼标定的原理性介绍
首先,我们要了解一下常规的手眼标定流程是怎么样的。(一)如果吸嘴
中心
就是法兰盘的
中心
则是下面这样的:按九宫格走九个点,取得九组吸嘴的像素坐标与法兰盘的机械坐标(图1)进行标定(二)如果吸嘴位置不在法兰盘
中心
则标定流程要复杂些:人工创建工具坐标Tool 1,把工具坐标
中心
创建到标定片的Mark点上去按九宫格走九个点,取得九组特征点的像素坐标与对应的机械坐标进行标定这里的难点是创建工具坐标的方法。人工...
旋转
中心
的计算方式
逆时针角度///
二维:已知圆上三点,
求
圆心坐标
///
旋转
前///
旋转
后///
点1///
点2///
点3三个点不在同一直线上
数据结构与算法
33,025
社区成员
35,336
社区内容
发帖
与我相关
我的任务
数据结构与算法
数据结构与算法相关内容讨论专区
复制链接
扫一扫
分享
社区描述
数据结构与算法相关内容讨论专区
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享