社区
单片机/工控
帖子详情
用keil编写一段stm32驱动无刷电机转动的程序?
weixin_38194331
2018-03-20 02:06:33
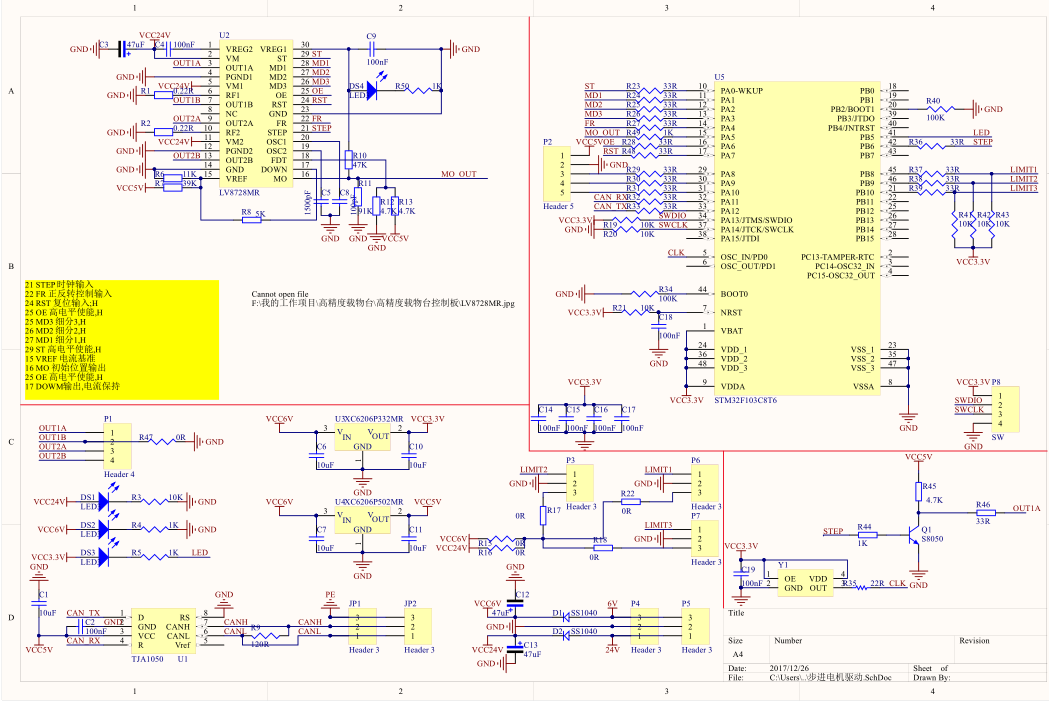
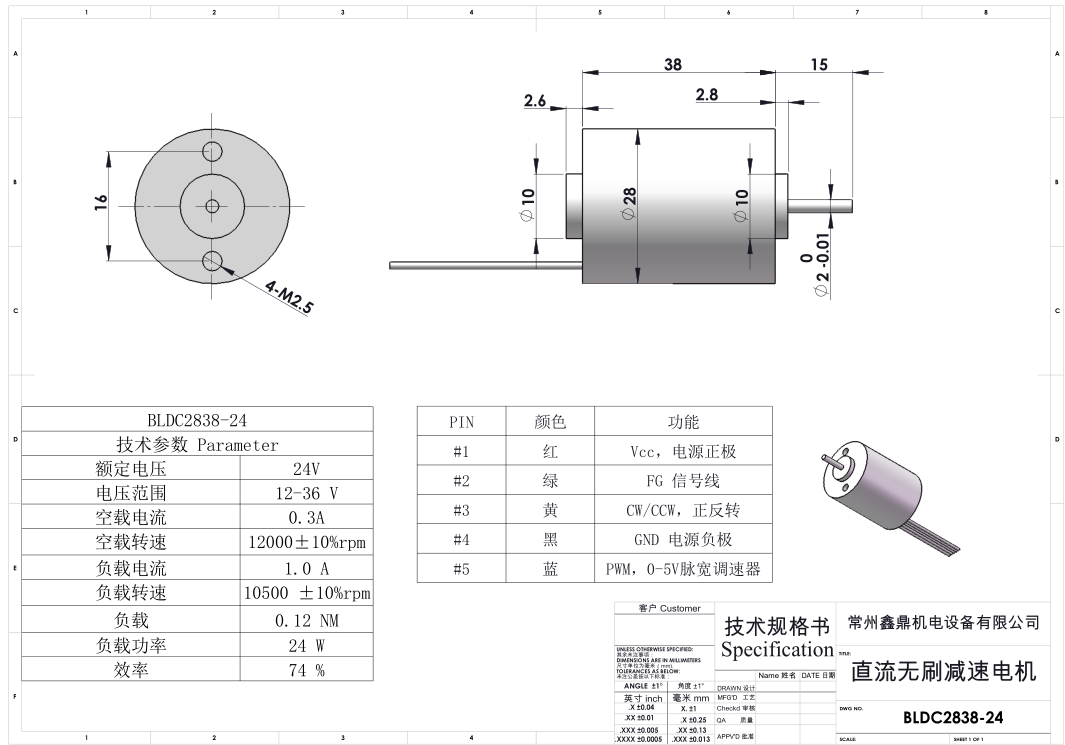
stm32驱动板如下 电机型号如下 程序改怎么写
...全文
1664
5
打赏
收藏
用keil编写一段stm32驱动无刷电机转动的程序?
stm32驱动板如下 电机型号如下 程序改怎么写
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
5 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
ZYNG
2019-01-17
打赏
举报
回复
我有程序,之前做过
「Thunder Studio」
2019-01-17
打赏
举报
回复
看你使用的是LV8728MR Drive step1:Review LV8728MR datasheet 熟知芯片的功能,了解具体功能的逻辑控制(比如,细分/正反转电平/刹车等待) step2:熟知电机的步数,起步/加速/减速初始步数 step3:考虑是否使用一些算法(梯形/S形)加减速 step4: 把想法转换成机器认识的语言
qq_34469647
2019-01-16
打赏
举报
回复
PWM控制,网上找找例子看看就知道了
weixin_38542043
2019-01-16
打赏
举报
回复
你猜我猜不猜
FOC——
无刷电机
的简单
驱动
本文介绍了
无刷电机
的工作原理,包括其结构与换向机制,并详细讲述了如何使用
STM32
CubeMX配置硬件,通过
Keil
或Clion
编写
代码来控制
无刷电机
转动
。作者通过实验验证了PWM信号的生成和电机控制逻辑,展示了从理论到实际操作的过程。
直流
无刷电机
驱动
基于
STM32
F302R8+X-NUCLEO-IHM07M1(一)
本文介绍了使用
STM32
F302R8主控板、X-NUCLEO-IHM07M1
驱动
板
驱动
直流
无刷电机
WR36BL61的方法。阐述了功能需求,包括电机正反转及换向控制。说明了硬件设计,还介绍了软件设计,如
STM32
CubeMX底层配置和
Keil
环境下的应用层开发,最后编译下载观察现象。
【从零开始实现
stm32
无刷电机
FOC】【实践】【7.2/7 完整代码
编写
】
本文介绍了使用
STM32
CubeMX配置外设生成
Keil
工程,实现
无刷电机
FOC控制的详细过程。包括芯片选择、工程配置、基础及各外设配置,还涉及工程代码
编写
,如FOC代码结构搭建、电机编码器角度读取等,最后进行闭环控制及PID系数调节,并给出注意点,源码开源。
STM32
控制
无刷电机
的PWM编程指南
本文深入探讨了如何利用
STM32
微控制器的PWM功能来精确控制
无刷电机
。内容涵盖了PWM原理、定时器配置、占空比调整、电机换相等关键步骤,并介绍了在
Keil
5集成开发环境中进行编程的方法。此外,还介绍了电流检测和PID控制算法的集成,以优化电机性能并确保稳定运行。
无刷电机
控制 - 基于
STM32
F405+CubeMX+HAL库+SimpleFOC01 ,移植simpleFOC
本次实验使用中空三相
无刷电机
和
STM32
F405的FOC电机控制板。先完成了
STM32
F103的simpleFOC开发,后开展
STM32
F405的开发。对比了两者在FOC电机控制上的差异,还介绍了基于
STM32
F103工程快速移植simpleFOC的方法,以及
Keil
、CubeMX设置和代码处理等内容。
单片机/工控
27,521
社区成员
28,799
社区内容
发帖
与我相关
我的任务
单片机/工控
硬件/嵌入开发 单片机/工控
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 单片机/工控
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享




