社区
脚本语言
帖子详情
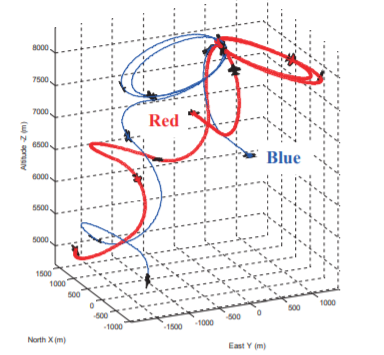
python在三维坐标系中显示飞机姿态
zhangyijie123
2018-03-26 03:19:13
如下图所示,如何用python来实现下面的效果,主要是这个小飞机的姿态不好显示
...全文
1664
3
打赏
收藏
python在三维坐标系中显示飞机姿态
如下图所示,如何用python来实现下面的效果,主要是这个小飞机的姿态不好显示
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
3 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
风雨潇潇一书生
2020-09-30
打赏
举报
回复
python怎么画?
PythonZhuhai
2018-04-23
打赏
举报
回复
你可以用vtk来画
多啦A梦的时光机
2018-03-27
打赏
举报
回复
卧槽,你这问题。。。 这个问题单靠Python解决不了吧,这么多个维度的计算,感觉你这个问题的解决还是得靠C
基于DQN深度强化学习解决
三维
在线装箱问题
python
源码+项目说明.zip
【资源介绍】 基于DQN深度强化学习解决
三维
在线装箱问题
python
源码+项目说明.zip 问题描述 物流公司在流通过程
中
,需要将打包完毕的箱子装入到一个货车的车厢
中
,为了提高物流效率,需要将车厢尽量填满,显然,车厢如果能被100%填满是最优的,但通常认为,车厢能够填满85%,可认为装箱是比较优化的。 设车厢为长方形,其长宽高分别为L,W,H;共有n个箱子,箱子也为长方形,第i个箱子的长宽高为li,wi,hi(n个箱子的体积总和是要远远大于车厢的体积),做以下假设和要求: 1. 长方形的车厢共有8个角,并设靠近驾驶室并位于下端的一个角的坐标为(0,0,0),车厢共6个面,其
中
长的4个面,以及靠近驾驶室的面是封闭的,只有一个面是开着的,用于工人搬运箱子; 2. 需要计算出每个箱子在车厢
中
的坐标,即每个箱子摆放后,其和车厢坐标为(0,0,0)的角相对应的角在车厢
中
的坐标,并计算车厢的填充率。 运行环境 主机 |内存 | 显卡 | IDE |
Python
| torch -----|------|------|-----|--------|----- CPU:12th Gen Intel(R) Core (TM) i7-12700H 2.30 GHz | 6GB RAM | NVIDIA GEFORCE RTX 3050 | Pycharm2022.2.1 |
python
3.8 | 1.13.0 思路 (1)箱子到来后,根据车厢的实际空间情况,按照策略选择放置点; (2)当摆放箱子时,以6种
姿态
摆放,并对其进行评估,使用评估值最高的
姿态
将箱子摆放在选
中
的角点上; (3)重复以上步骤,直到摆放完毕。 建立模型 在车厢内部设置
坐标系
,靠近驾驶室并位于下端的一个角的坐标为(0,0,0),相交于原点的车厢长边、宽边和高边分别为x轴,y轴和z轴方向,L、W、H分别为车厢的长、宽、高。箱子具有六种摆放
姿态
,分别以箱子的长宽、长高、宽高平面为底,旋转90°可以得到另外三种摆放
姿态
。 核心 # 箱子放置策略 本算法将角点作为车厢内部空间
中
箱子的摆放位置,每次放入新箱子后搜索新生成的角点,当向车厢
中
放入第一个箱子时,假设车厢
中
只有原点一个角点,当一个箱子放入后,会产生新的角点,再放置箱子后,又会产生新的角点。 建立箱子可放置点列表,表示箱子i到来时,车厢内部所有可选的摆放位置,在放置新箱子后更新可放置点列表,并记录已放置箱子到车厢顶部距离,用于后续的奖励函数。 # DQN (1)设置一些超参数,包括ε-greedy使用的ε,折扣因子γ,目标网络更新频率,经验池容量等。 (2)由于给定的箱子数据较少,为了增加模型训练数据数量,将给定的箱子数据打乱,以随机的形式生成并保存,作为训练数据,训练网络模型。 (3)奖励函数 使用x-y平面
中
两个最大剩余矩形面积(如下图)之和与箱子到车厢顶部的距离作为奖励值R,奖励函数表示如下 【说明】 该项目是个人毕设项目,答辩评审分达到95分,代码都经过调试测试,确保可以运行!欢迎下载使用,可用于小白学习、进阶。 该资源主要针对计算机、通信、人工智能、自动化等相关专业的学生、老师或从业者下载使用,亦可作为期末课程设计、课程大作业、毕业设计等。 项目整体具有较高的学习借鉴价值!基础能力强的可以在此基础上修改调整,以实现不同的功能。 欢迎下载交流,互相学习,共同进步!
DQN深度强化学习解决
三维
在线装箱问题
python
源码+项目说明.zip
【资源说明】 1、该资源包括项目的全部源码,下载可以直接使用! 2、本项目适合作为计算机、数学、电子信息等专业的课程设计、期末大作业和毕设项目,作为参考资料学习借鉴。 3、本资源作为“参考资料”如果需要实现其他功能,需要能看懂代码,并且热爱钻研,自行调试。 DQN深度强化学习解决
三维
在线装箱问题
python
源码+项目说明.zip ## 问题描述 物流公司在流通过程
中
,需要将打包完毕的箱子装入到一个货车的车厢
中
,为了提高物流效率,需要将车厢尽量填满,显然,车厢如果能被100%填满是最优的,但通常认为,车厢能够填满85%,可认为装箱是比较优化的。 设车厢为长方形,其长宽高分别为L,W,H;共有n个箱子,箱子也为长方形,第i个箱子的长宽高为li,wi,hi(n个箱子的体积总和是要远远大于车厢的体积),做以下假设和要求: 1. 长方形的车厢共有8个角,并设靠近驾驶室并位于下端的一个角的坐标为(0,0,0),车厢共6个面,其
中
长的4个面,以及靠近驾驶室的面是封闭的,只有一个面是开着的,用于工人搬运箱子; 2. 需要计算出每个箱子在车厢
中
的坐标,即每个箱子摆放后,其和车厢坐标为(0,0,0)的角相对应的角在车厢
中
的坐标,并计算车厢的填充率。 ## 运行环境 主机 |内存 | 显卡 | IDE |
Python
| torch -----|------|------|-----|--------|----- CPU:12th Gen Intel(R) Core (TM) i7-12700H 2.30 GHz | 6GB RAM | NVIDIA GEFORCE RTX 3050 | Pycharm2022.2.1 |
python
3.8 | 1.13.0 ## 思路 (1)箱子到来后,根据车厢的实际空间情况,按照策略选择放置点; (2)当摆放箱子时,以6种
姿态
摆放,并对其进行评估,使用评估值最高的
姿态
将箱子摆放在选
中
的角点上; (3)重复以上步骤,直到摆放完毕。 ## 建立模型 在车厢内部设置
坐标系
,靠近驾驶室并位于下端的一个角的坐标为(0,0,0),相交于原点的车厢长边、宽边和高边分别为x轴,y轴和z轴方向,L、W、H分别为车厢的长、宽、高。箱子具有六种摆放
姿态
,分别以箱子的长宽、长高、宽高平面为底,旋转90°可以得到另外三种摆放
姿态
。 ## 核心 ### 箱子放置策略 本算法将角点作为车厢内部空间
中
箱子的摆放位置,每次放入新箱子后搜索新生成的角点,当向车厢
中
放入第一个箱子时,假设车厢
中
只有原点一个角点,当一个箱子放入后,会产生新的角点,再放置箱子后,又会产生新的角点。 建立箱子可放置点列表,表示箱子i到来时,车厢内部所有可选的摆放位置,在放置新箱子后更新可放置点列表,并记录已放置箱子到车厢顶部距离,用于后续的奖励函数。 ### DQN (1)设置一些超参数,包括ε-greedy使用的ε,折扣因子γ,目标网络更新频率,经验池容量等。 (2)由于给定的箱子数据较少,为了增加模型训练数据数量,将给定的箱子数据打乱,以随机的形式生成并保存,作为训练数据,训练网络模型。 (3)奖励函数 使用x-y平面
中
两个最大剩余矩形面积(如下图)之和与箱子到车厢顶部的距离作为奖励值R,奖励函数表示如下: (4)动作-价值函数网络和目标动作-价值函数网络设置为包含6层卷积层的CNN。对当前状态和动作建模,使其能够输入到价值网络Q和Q’
中
。以车厢的底面为基准,建模L*W的矩阵,每个元素代表该点放置的箱子最大高度。 (5)动作选择 根据当前的状态(当前车厢的属性,包括尺寸、放置的所有箱子、H矩阵、可放置点列表等),使用ε-greedy方法选择具有最大Q值的动作或随机选择动作(动作是箱子的放置点和摆放
姿态
)。 (6)经验重放 ## 说明 将所有文件夹放置在同一目录下,train.py用于模型训练,cnn.pth是已经训练好的模型,在eval.py
中
导入后直接运行eval.py即可。 ## 不足 1、填充率 一般认为车厢填充率高于85%,认为装箱算法是较优的,本实验设计的装箱方案填充率较低,在60%-80%间,分析原因可能在于强化学习网络的参数不够合适,算法有待优化。 改进的方向:调整强化学习网络的参数,选择更加合适的参数。
python
数据分析基础
8个常用
python
工具库 + 10小时以上视频课程 + 50个工作常用技能 + 4个爬虫案例 + 10个行业数据分析案例, 介绍
python
数据分析、爬虫基础技巧, 助你提升职场竞争力, 转行、应聘简历加分。 课程介绍
python
数据读取、...
V
Python
三维
仿真(NO.4) 创建
坐标系
V
Python
中
画笛卡尔
坐标系
Python
坐标系
转换
1. 相关名词 地心地固
坐标系
(Earth-Centered, Earth-Fixed,ECEF),简称地心
坐标系
。 地理
坐标系
统(Geographic Coordinate System,GCS),
坐标系
是地心
坐标系
,用经纬度表示球面上的点。 世界大地测量系统(World Geodetic System, WGS),比如WGS84,是一种地理
坐标系
统,用于全球定位系统(GPS)。 投影
坐标系
统(Projection Coordinate System,PCS),在二维平面上用米表示位置。 通用横轴墨卡托
脚本语言
37,720
社区成员
34,239
社区内容
发帖
与我相关
我的任务
脚本语言
JavaScript,VBScript,AngleScript,ActionScript,Shell,Perl,Ruby,Lua,Tcl,Scala,MaxScript 等脚本语言交流。
复制链接
扫一扫
分享
社区描述
JavaScript,VBScript,AngleScript,ActionScript,Shell,Perl,Ruby,Lua,Tcl,Scala,MaxScript 等脚本语言交流。
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享



