

111,131
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享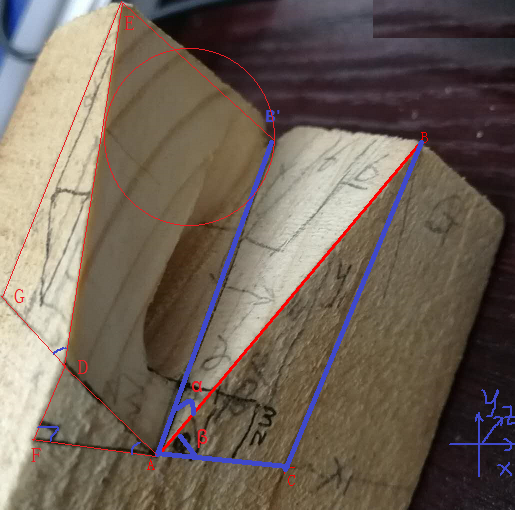


 上图中BO=30,OG=50,AG=10,AE=10,DF=25
∠DFC=∠AED=∠AGO=∠AOB=∠DCB=90⁰
∠GAO=atan1(50,10)=78.69⁰
AO=sqrt(10*10+50*50)=50.9902
∠BAO=atan1(30,50.9902)=atan(0.58835)=30.47⁰
△ABO中三点坐标分别为:o(0,0,0),A(0,-50,10),B(-30,0,0)
△ABO⊥□ABCD
1.求□ABCD与x,y,z轴的夹角是多少,请列出计算或推导公式。
2.求□ABCD的平面方程.
3.已知:直线MN//AB,MB=5.求直线MN方程.
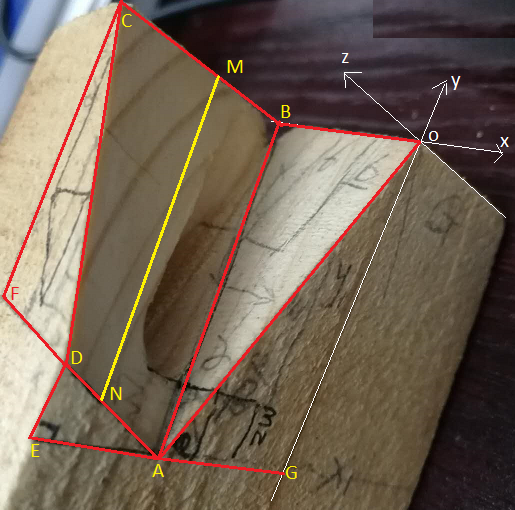
上图中BO=30,OG=50,AG=10,AE=10,DF=25
∠DFC=∠AED=∠AGO=∠AOB=∠DCB=90⁰
∠GAO=atan1(50,10)=78.69⁰
AO=sqrt(10*10+50*50)=50.9902
∠BAO=atan1(30,50.9902)=atan(0.58835)=30.47⁰
△ABO中三点坐标分别为:o(0,0,0),A(0,-50,10),B(-30,0,0)
△ABO⊥□ABCD
1.求□ABCD与x,y,z轴的夹角是多少,请列出计算或推导公式。
2.求□ABCD的平面方程.
3.已知:直线MN//AB,MB=5.求直线MN方程.

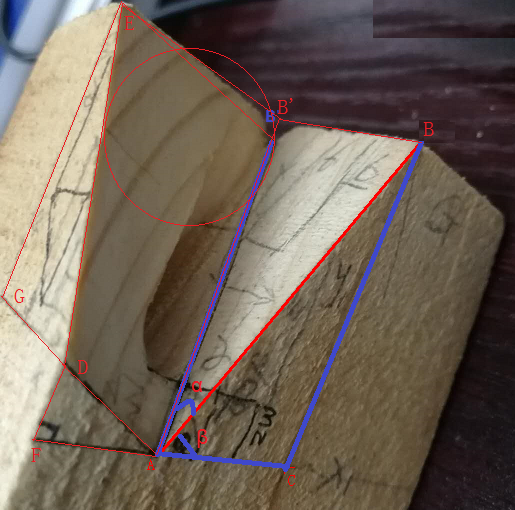 BB'平行于GD,BB'垂直于AB及bc.
求B‘的坐标计算公式。
实际上就是要求出
1.线AD上任一点的坐标公式,
2.线AB'上任一点的坐标公式。
3.线B'E上任一点坐标公式。
BB'平行于GD,BB'垂直于AB及bc.
求B‘的坐标计算公式。
实际上就是要求出
1.线AD上任一点的坐标公式,
2.线AB'上任一点的坐标公式。
3.线B'E上任一点坐标公式。

