社区
硬件设计
帖子详情
opo7c 运算放大器 电路问题
CodeAllen嵌入式
优质创作者: 嵌入式与硬件开发技术领域
领域专家: C/C++技术领域
2018-06-01 08:46:27
按照差分运算放大接的电路,放大比例一比一,但是实际输入1引脚和2引脚均接地时输出端有一个6V电压,不知道为什么?有接触过这种电路的帮忙看下
...全文
1518
5
打赏
收藏
opo7c 运算放大器 电路问题
按照差分运算放大接的电路,放大比例一比一,但是实际输入1引脚和2引脚均接地时输出端有一个6V电压,不知道为什么?有接触过这种电路的帮忙看下
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
5 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
zhangruxpy
2020-05-16
打赏
举报
回复
发错了这个图
zhangruxpy
2020-05-16
打赏
举报
回复
这个你会吗
原理
tianxj001
2018-06-01
打赏
举报
回复
对了,你这里运放只是5V供电,那有能力输出6V电压,这种情况,根本就是外面错误的倒送过来的。
CodeAllen嵌入式
2018-06-01
打赏
举报
回复
好的,我检查下
tianxj001
2018-06-01
打赏
举报
回复
你说的1和2都接地,和图哪都对不上,应该是INPUT和OUTPUT2个脚,全部接地的话,如果芯片、线路正确,是不可能输出6V的,没法分析什么,肯定是实际线路有问题,或者某个器件有问题。 就这种线路,不需要OP07,哪怕用324,这样接法,如果器件正确,同相反相没有搞错。输出不会超过2mV。因为324的失调电压也就<2mV.,一倍差分放大器,输出失调等于输入失调。 如果器件都是对的,怀疑实物线路和原理不符。 原理图引脚顺序都没问题,如果实物顺序错误,就不知道会发生什么情况了,比如2和3脚顺序错误。
模拟
电路
学习总结(附加Multisim仿真备注)
Mutisim
用软件AD画PCB
一、 简介Altium Designer a. 下载安装AD b. 新建一个PC工程:文件——>new——>project——>PCB c. 新建一个原理图:文件——>new——>schematic d. 导入基本元件库:libraries——>Available Libraries——>Installe from file——>选两个.IntLib文件 打开 e. 查找元件: (eg.电阻)选Miscellaneous Devices.IntLib——&g
高速数字隔离器ISOM8710与STM32G474RE的工业应用方案
数字隔离技术是工业控制系统的关键基础,通过电容耦合或磁耦合原理实现电气隔离,确保高压与低压
电路
间的安全通信。相比传统光耦,现代数字隔离器如TI的ISOM8710具有更高传输速率(25Mbps)和更强抗干扰能力(150kV/μs CMTI),配合STM32G4系列MCU的硬件加密和高精度定时器,可构建高可靠性工业控制系统。该方案特别适用于需要实时信号处理和安全隔离的电机驱动、智能电表等场景,其中ISOM8710的低功耗特性(1.5mA)也使其成为电池供电设备的理想选择。
altium09怎么查元器件_Altium_Designer如何快速寻找元件和封装
1Altium下Miscellaneous Devices.Intlib元件库中常用元件有:电阻系列(res*)排组(res pack*)电感(inductor*)电容(cap*,capacitor*)二极管系列(diode*,d*)三极管系列(npn*,pnp*,mos*,MOSFET*,MESFET*,jfet*,IGBT*)
运算放大器
系列(op*)继电器(relay*)8位数码显示管(dpy...
NOTEBOOK_1电子元器件
本文主要简述各种电子元器件含义,简写形式及其功能简单说明,同时配备例图。 每个人有每个人的特性,电子元件也各有特性,使用时请对其了解后再使用。
硬件设计
6,172
社区成员
11,288
社区内容
发帖
与我相关
我的任务
硬件设计
硬件/嵌入开发 硬件设计
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 硬件设计
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享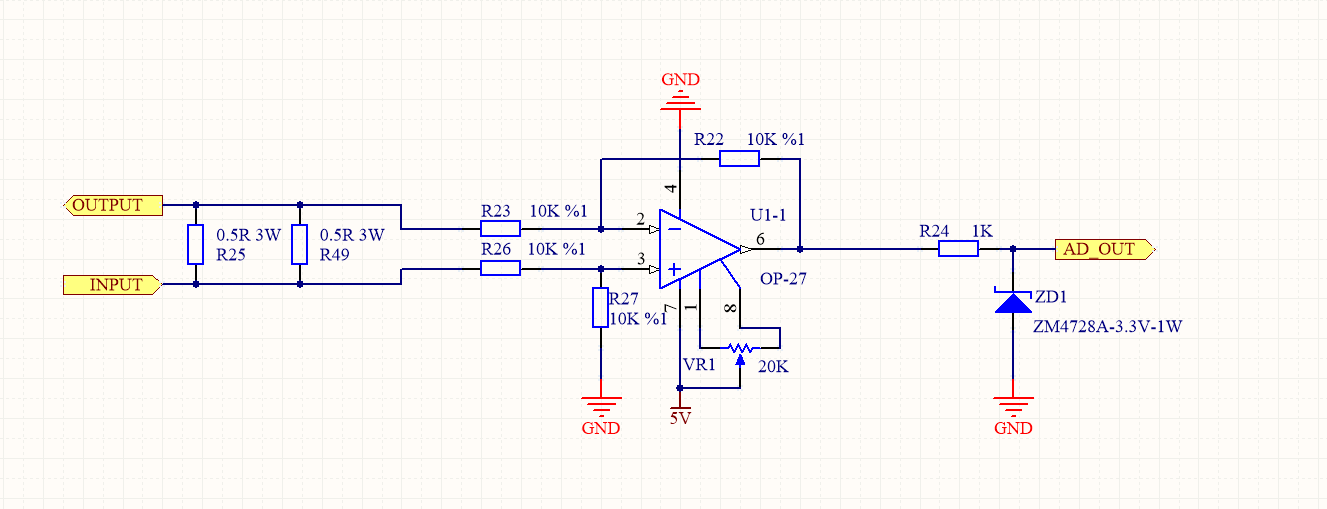

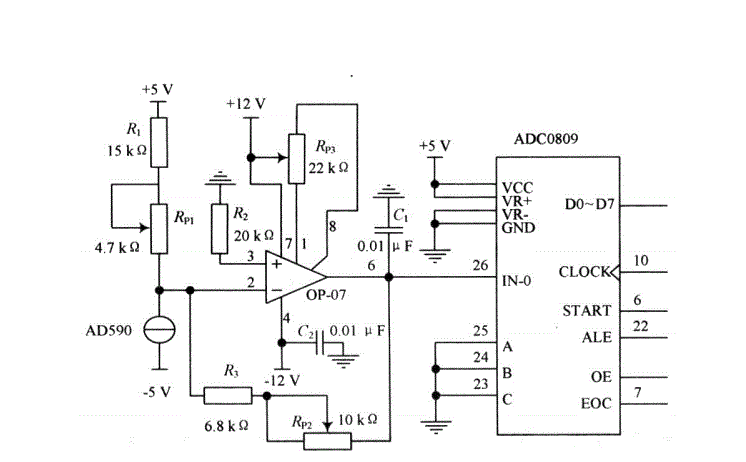
 这个你会吗
这个你会吗

