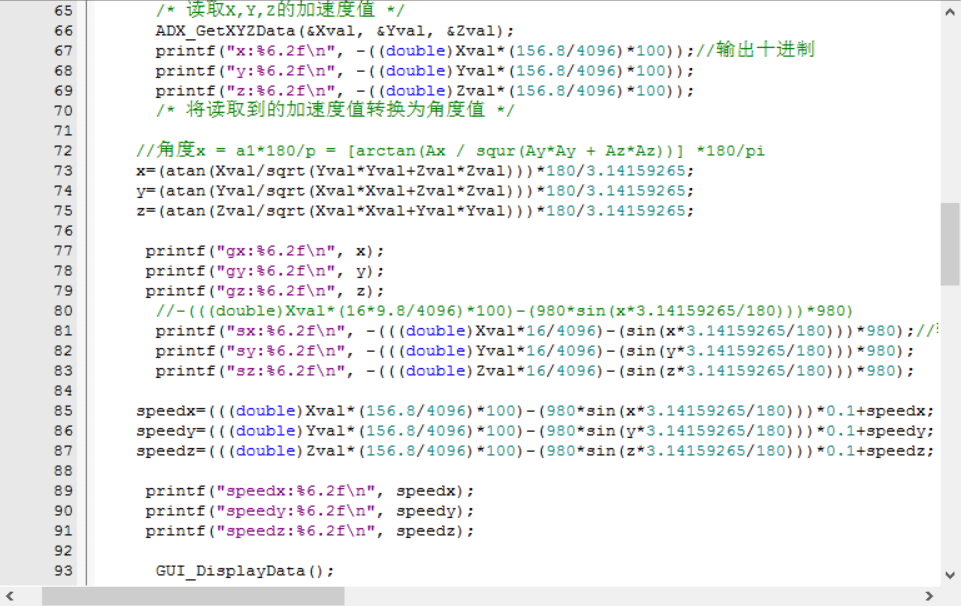
现在才意识到用加速度测速度与位移真的难以实现,网上搜了一下,很多都是与运动物体分开的测速传感器,不适合。请问模块绑在物体上用来测物体速度或者位移的模块应该用什么?
如果除去重力加速度后,无论器件位置怎么放,静止时加速度按公式应该为0
27,373
社区成员
28,771
社区内容
加载中
试试用AI创作助手写篇文章吧



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享



