今天,依然跟创客集结号做一个交通灯实验,这个实验所需的元件除了Arduino 控制器和下载线还需要的硬件如下:
红色M5*1、黄色M5*1、绿色M5*1、220Ω电阻*3、面包板*1 、面包板跳线*1扎。
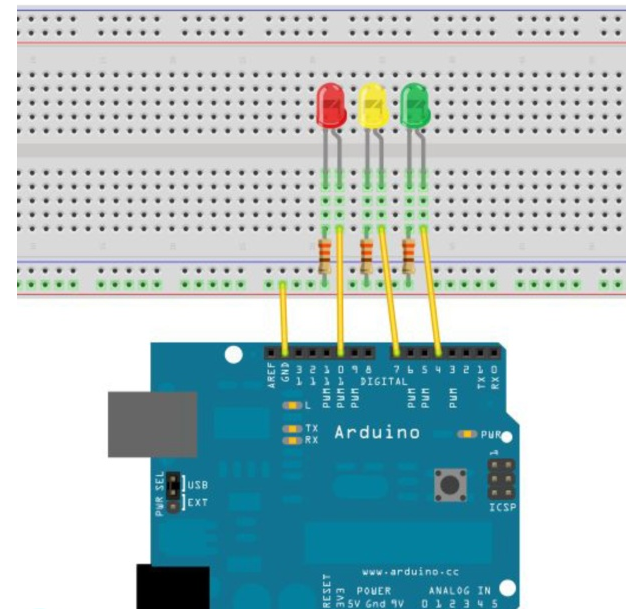
这里使用的分别是数字10、7、4接口,原理图如下:
既然是交通灯模拟实验,红黄绿三色小灯闪烁时间就要模拟真实的交通灯,这里使用Arduino的delay()函数来控制延时时间。
参考程序如下:
int redled =10; //定义数字10 接口
int yellowled =7; //定义数字7 接口
int greenled =4; //定义数字4 接口
void setup()
{
pinMode(redled, OUTPUT);//定义红色小灯接口为输出接口
pinMode(yellowled, OUTPUT); //定义黄色小灯接口为输出接口
pinMode(greenled, OUTPUT); //定义绿色小灯接口为输出接口
}
void loop()
{
digitalWrite(redled, HIGH);//点亮红色小灯
delay(1000);//延时1 秒
digitalWrite(redled, LOW); //熄灭红色小灯
digitalWrite(yellowled, HIGH);//点亮黄色小灯
delay(200);//延时0.2 秒
digitalWrite(yellowled, LOW);//熄灭黄色小灯
digitalWrite(greenled, HIGH);//点亮绿色小灯
delay(1000);//延时1 秒
digitalWrite(greenled, LOW);//熄灭绿
若想学习更多Arduino编程语言知识和教程,可搜索创客集结号或wwwxk100com。


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

