这是我设计的一个电路图,在LTspice仿真用
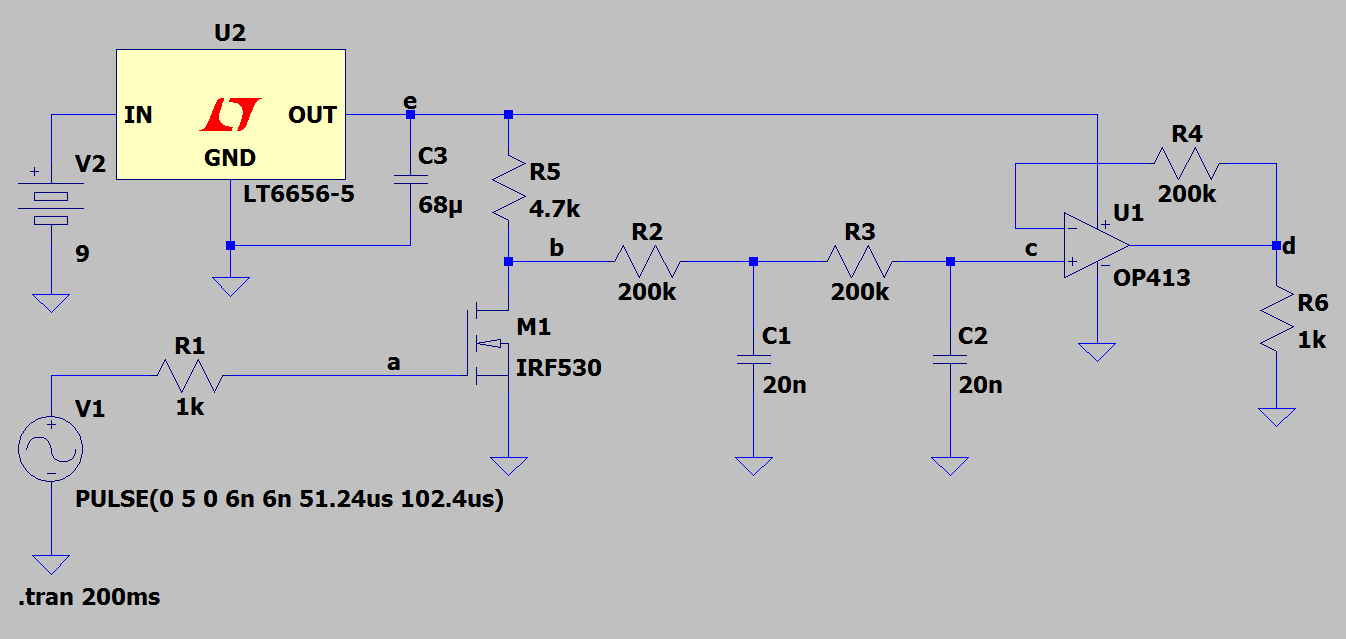
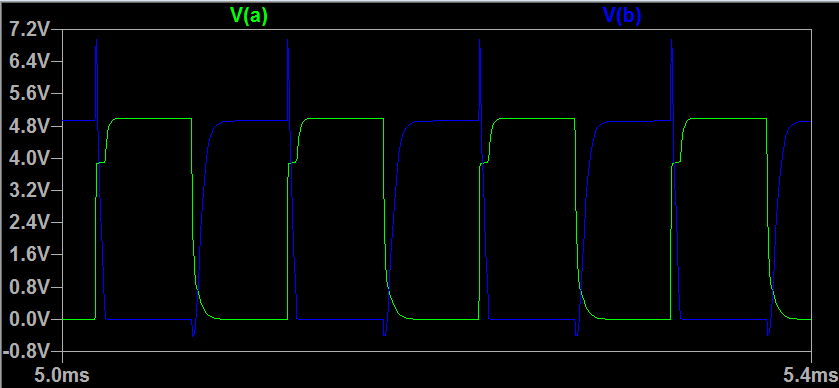
然后信号是周期100us,占空比50%的pwm波,现在测量b点波形
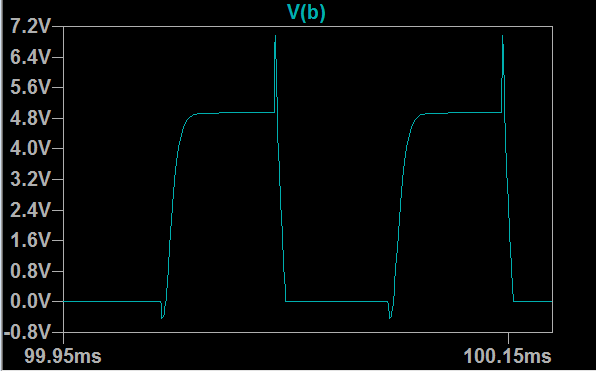
很明显有一个尖峰,该怎么消除呀?
我曾经试过,pwm信号通过mos管驱动电磁阀(里面是线圈,相当于电机吧),测量电磁阀两端也是类似的图形,存在尖峰。然后电磁阀是感性负载所以好理解,我这个地方为什么会有尖峰呢?后面的RC滤波电路相当于感性负载吗?
然后如果要消除尖峰,是在mos管之前考虑,还是在之后考虑呀?

这个图是a点的波形,主要是上升沿跳变那一瞬间突变的太厉害了,如果能降低这个突变速度,尖峰应该就会削弱吧?


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享