多种蚁群算法在机器人路径规划中的应用及其在MATLAB中GUI展示(完整代码)
 月下花弄影 2018-10-21 02:47:41
月下花弄影 2018-10-21 02:47:41 本人研究生期间主要研究蚁群算法及其在机器人路径规划中的应用。
本代码是为了在上课时画出一个图形来比较不同种类的蚁群算法,主要包裹ACS,MMAS,EAS等经典的蚁群算法,最后还包括本人提出的另一种算法。
本代码已经成功申请了软件著作权(因此请注意:本代码具有版权)
软件环境主要是MATLAB(2016B及其以上)下的GUI。
主要功能有:
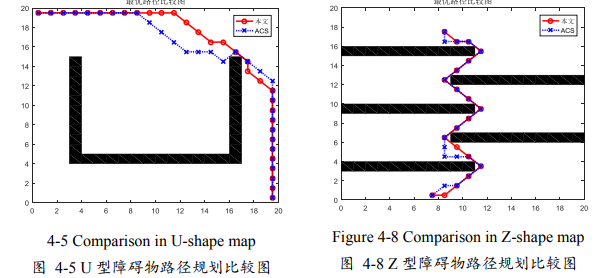
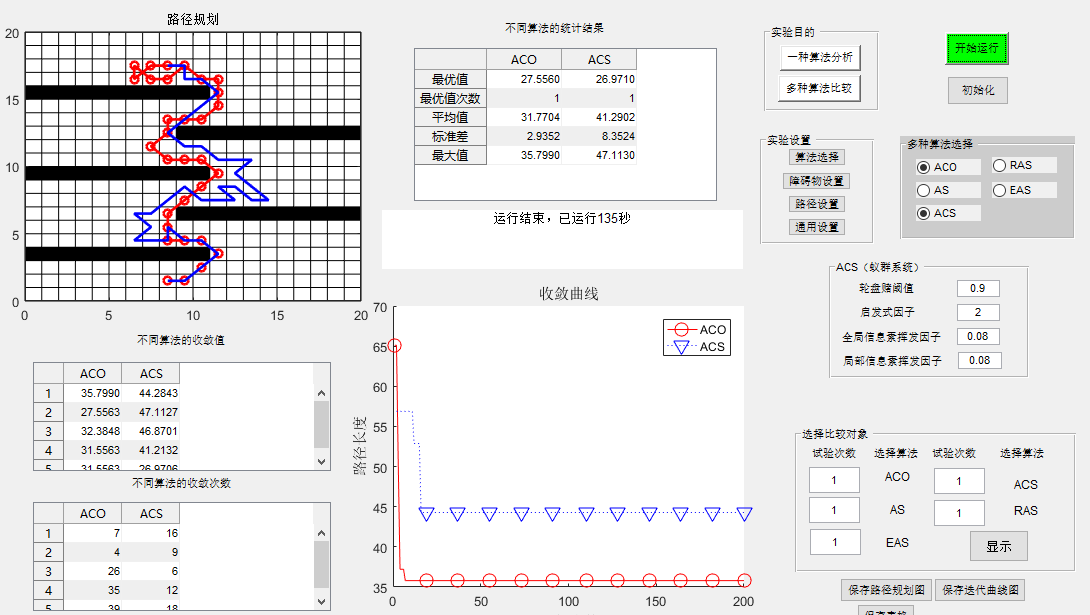
1、比较不同算法在不同栅格环境下的运行情况,(栅格环境可以自行设计)
2、观察实验结果,包括迭代曲线和运行多次的平均值。可以直接观察算法本身的鲁棒性。
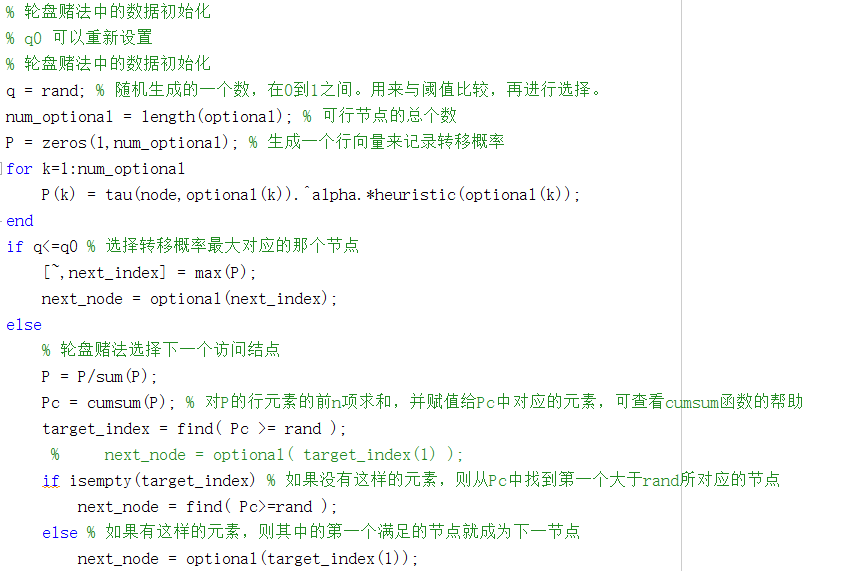
3、代码设计非常模块化,可以同时学习多种蚁群算法。
下载地址:https://download.csdn.net/download/qq_27261889/10735012
使用截图如下:


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享