社区
Windows Server
帖子详情
客户机远程连接win2008R2 重新定向惠普激光打印机为何无法打印,一打就发送2个任务到本地
man100kg
2018-11-13 09:55:54
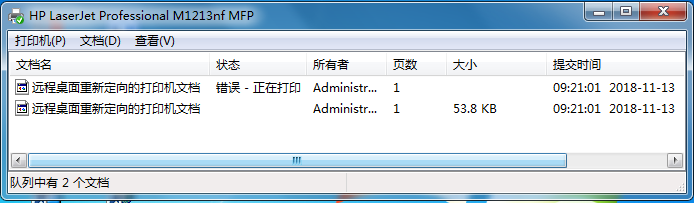
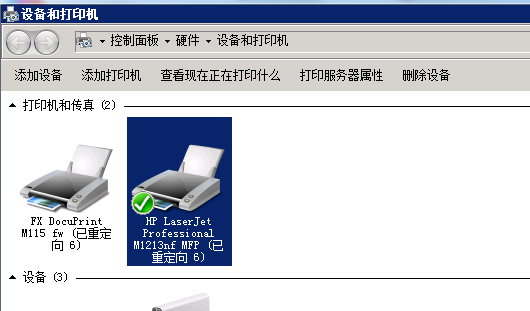
客户机远程连接win2008 重新定向惠普激光打印机为何无法打印一打就发送2个任务到本地,一个任务大小是0 K 无法正常打印。别的型号没问题,服务器和客户机都重新安装驱动也不行。求大师指教
本地打印任务
远程会话
...全文
154
2
打赏
收藏
客户机远程连接win2008R2 重新定向惠普激光打印机为何无法打印,一打就发送2个任务到本地
客户机远程连接win2008 重新定向惠普激光打印机为何无法打印一打就发送2个任务到本地,一个任务大小是0 K 无法正常打印。别的型号没问题,服务器和客户机都重新安装驱动也不行。求大师指教 本地打印任务 远程会话
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
浩淼锋
2019-07-22
打赏
举报
回复
撸主,我大胆猜测,你还没解决?或者重装了win10?
man100kg
2018-11-13
打赏
举报
回复
本地打印是没问题的,就是远程里发出的打印任务不能打印
基于DeepSpeech2的中文语音识别系统(新闻数据集和THCS30数据集进行训练,具备实时在线语音识别的能力).zip
基于DeepSpeech2的中文语音识别系统(新闻数据集和THCS30数据集进行训练,具备实时在线语音识别的能力).zip 关键点 项目基于DeepSpeech2的中文语音识别系统,使用新闻数据集和THCS30数据集进行训练,具备实时在线语音识别的能力。 模型结构包括卷积层(Conv)、双向循环层(BiRNN)和全连接层(FC),输入为光谱特征向量,输出为目标词汇表的字符概率分布。 使用CTC(连接时序分类)损失函数进行训练,结合N-Gram语言模型,显著降低词错误率(WER)。 采用梁搜索(Beam Search)算法结合语言模型和CTC预测,优化实时性能,设计了三种不同的策略以适应不同的计算需求。 系统采用前端和后端分离的部署结构,前端基于Web应用实现,后端在GPU服务器上运行以加速深度学习网络的前向传播。 前端实现了降噪、静音检测和音频预处理功能,并通过TCP套接字与后端服务器通信,完成音频上传和结果接收。 实验表明,较浅的模型和较大的隐藏单元在小规模数据集上表现更优,语言模型的引入进一步降低了WER。
AtakltiEkwazgi_Master-s-MATLAB-Simulink_482936_1773220026245.zip
AtakltiEkwazgi_Master-s-MATLAB-Simulink_482936_1773220026245.zip
基于MatLabSimulink平台的车辆燃油经济性综合仿真与优化系统项目_该项目专注于构建一个高保真的车辆纵向动力学仿真模型集成发动机油耗MAP图变速箱传动效率轮胎滚动阻.zip
基于MatLabSimulink平台的车辆燃油经济性综合仿真与优化系统项目_该项目专注于构建一个高保真的车辆纵向动力学仿真模型集成发动机油耗MAP图变速箱传动效率轮胎滚动阻.zip
MATLAB与Simulink跨版本兼容性演示项目集_ArduinoUnoMega支持包S函数构建器C嵌入式代码DS18S20温度传感器LCD1602显示屏Sim.zip
MATLAB与Simulink跨版本兼容性演示项目集_ArduinoUnoMega支持包S函数构建器C嵌入式代码DS18S20温度传感器LCD1602显示屏Sim.zip
【柔性机器人执行器的模型和控制算法研】从多个参数集中批量生成即用型关节执行器模型类,并包含各种非线性动力学效应研究(Matlab代码实现)
内容概要:本文围绕柔性机器人执行器的建模与控制算法展开研究,提出了一种基于Matlab的批量生成即用型关节执行器模型类的方法,能够从多个参数集中快速构建包含多种非线性动力学效应的执行器模型。研究重点涵盖了柔性执行器的动力学特性建模,如弹性变形、迟滞效应、摩擦与耦合非线性等复杂行为,并结合控制系统设计实现高精度动态响应。通过模块化编程方式,实现了模型的可扩展性与复用性,便于在不同机器人系统中进行仿真验证与控制算法测试,尤其适用于需要高保真动力学仿真的柔顺控制、力控与人机交互应用场景。; 适合人群:具备一定机器人动力学与控制理论基础,熟悉Matlab/Simulink仿真环境,从事机器人系统设计、智能控制或柔性执行器研发的科研人员及工程技术人员,尤其适合研究生及高年级本科生开展课题研究。; 使用场景及目标:① 构建高精度柔性关节执行器仿真模型,用于验证先进控制算法(如自适应控制、鲁棒控制、智能控制)的有效性;② 支持多参数批量仿真,加速柔性机器人系统的设计迭代与性能评估;③ 服务于教学演示、科研复现与工业原型开发,提升研究效率与模型通用性。; 阅读建议:建议读者结合Matlab代码逐模块理解建模流程,重点关注非线性动力学项的数学表达与程序实现方式,并尝试调整参数集以观察系统响应变化,从而深入掌握柔性执行器的动态特性与控制难点。
Windows Server
6,871
社区成员
177,938
社区内容
发帖
与我相关
我的任务
Windows Server
Windows 2016/2012/2008/2003/2000/NT
复制链接
扫一扫
分享
社区描述
Windows 2016/2012/2008/2003/2000/NT
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
