社区
Qt
帖子详情
qt5 配置basler pylon 相机 结合opencv
地猎豹
2018-11-25 11:17:41
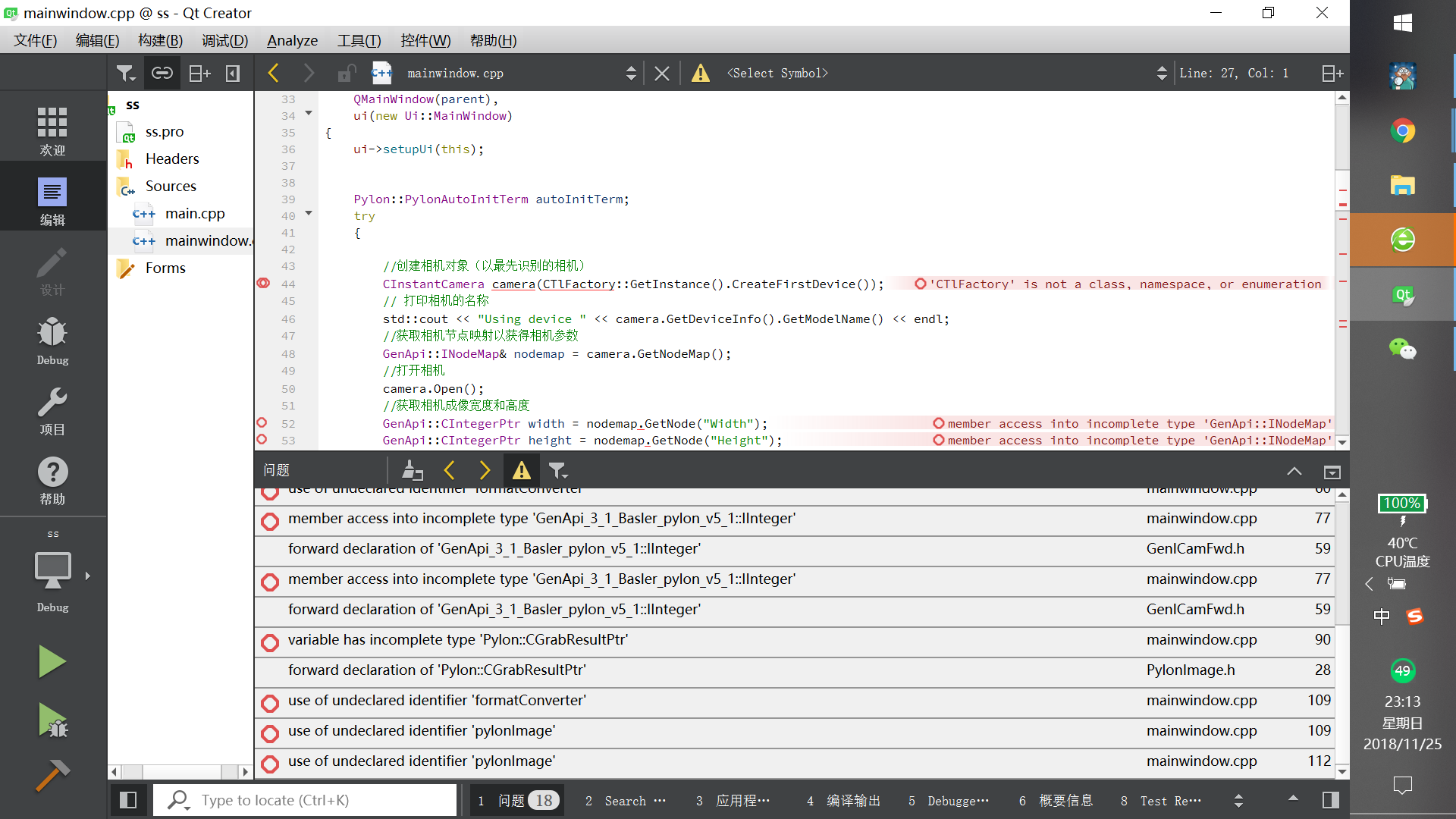
小弟最近在做一个opencv的项目 需要用到qt来做项目 用的相机是pylon
我参考网上的一些历程 配置好环境
但是qt构建项目的时候出现问题 一直没有解决
...全文
1178
2
打赏
收藏
qt5 配置basler pylon 相机 结合opencv
小弟最近在做一个opencv的项目 需要用到qt来做项目 用的相机是pylon 我参考网上的一些历程 配置好环境 但是qt构建项目的时候出现问题 一直没有解决
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
米say安
2019-10-21
打赏
举报
回复
博主你的环境怎么配置的啊
kerwin liu
2018-12-05
打赏
举报
回复
我也在用opencv(3.3)+qt。windows和ubuntu,环境搭建都没问题。不知道你要问什么问题。
【Qt 学习之路】调用工业
相机
Basler
的SDK使用示例
本文介绍使用Qt和
Basler
SDK进行
Basler
工业
相机
开发的方法,包括开发环境
配置
、
相机
控制类实现及图像抓取流程。
Basler
相机
实时图像显示--Qt代码
本文详细介绍使用Qt、
Pylon
SDK、
OpenCV
实现
Basler
相机
实时图像显示的过程,包括环境
配置
、代码解析及多线程处理技巧。
Qt+
BASLER
相机
+
OpenCV
本文详细介绍了如何使用
Basler
acA1920-40gc GigE
相机
与
Pylon
5 SDK进行图像采集的过程。内容包括安装
配置
步骤、示例工程介绍以及具体的代码实现等。
Basler
相机
使用(
pylon
6)+clion编辑器+qt+
opencv
本文详细介绍如何使用CMake
配置
pylon
相机
库,并提供在Ubuntu 16.04上安装
OpenCV
的步骤。从设置CMake最低版本,到指定
pylon
根目录,再到使用
pylon
-config获取编译和链接标志,最后到
OpenCV
的下载、解压、依赖安装、cmake
配置
、编译及安装全过程,为读者提供了全面的技术指导。
Qt
21,499
社区成员
26,692
社区内容
发帖
与我相关
我的任务
Qt
Qt 是一个跨平台应用程序框架。通过使用 Qt,您可以一次性开发应用程序和用户界面,然后将其部署到多个桌面和嵌入式操作系统,而无需重复编写源代码。
复制链接
扫一扫
分享
社区描述
Qt 是一个跨平台应用程序框架。通过使用 Qt,您可以一次性开发应用程序和用户界面,然后将其部署到多个桌面和嵌入式操作系统,而无需重复编写源代码。
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章
 地猎豹 2018-11-25 11:17:41
地猎豹 2018-11-25 11:17:41 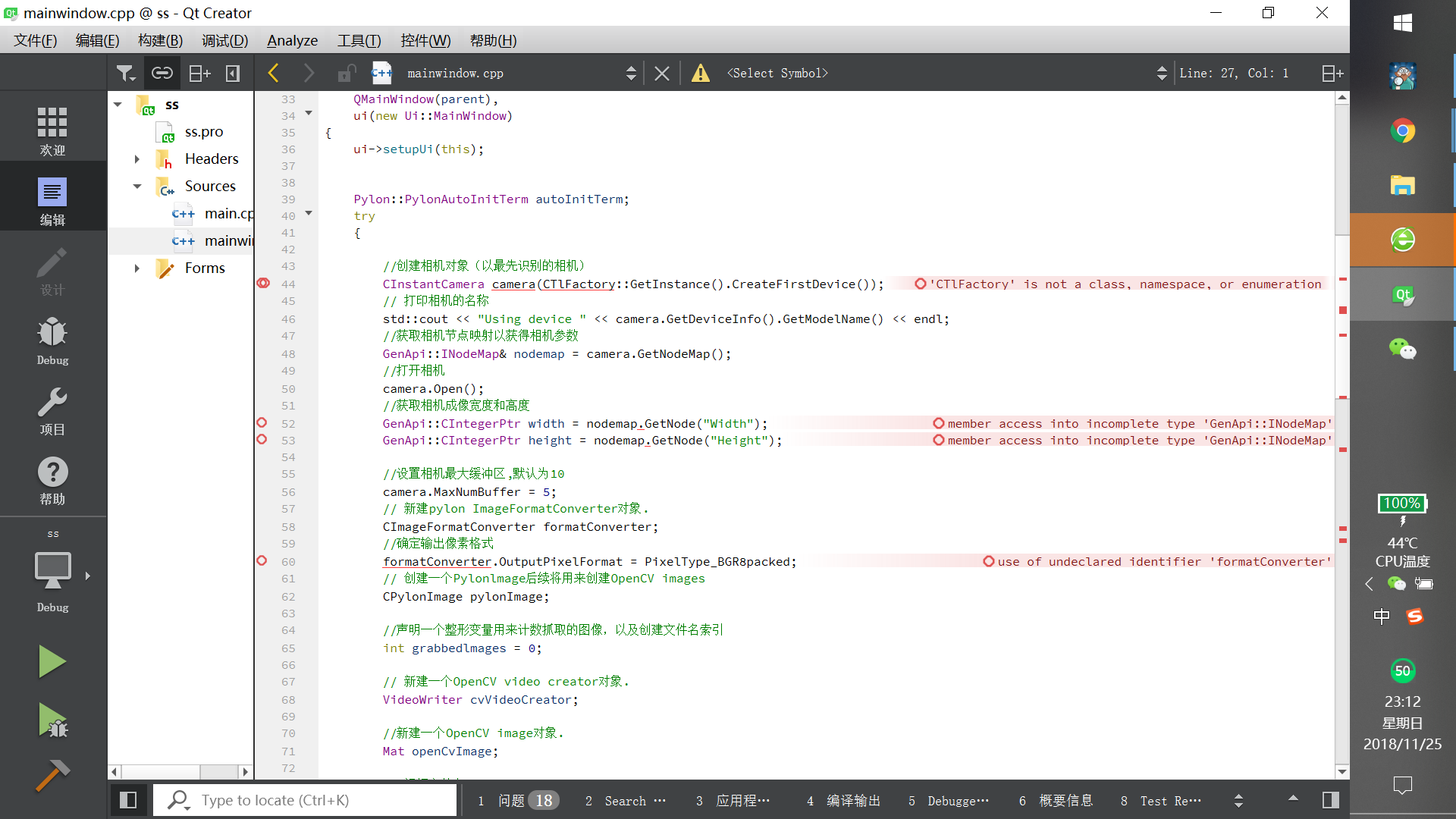


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

