[quote=引用 4 楼 polly_polly 的回复:] 可以了,但是还是不太理解为什么 P2DIR &= ~BIT2; // 配置p2.2作为输入(复位后也总是输入) P2REN = BIT2; // 为p2.2启用上拉/下拉 P2OUT |= BIT2; // 为p2.2选择上拉电阻 改为 P2DIR &= ~BIT2; // 配置p2.2作为输入(复位后也总是输入) P2REN = BIT2; // 为p2.2启用上拉/下拉 P2OUT &= ~BIT2; // 为p2.2选择下拉电阻 就可以了, 哪位高手解释一下是什么原因呢,谢谢
可以了,但是还是不太理解为什么 P2DIR &= ~BIT2; // 配置p2.2作为输入(复位后也总是输入) P2REN = BIT2; // 为p2.2启用上拉/下拉 P2OUT |= BIT2; // 为p2.2选择上拉电阻 改为 P2DIR &= ~BIT2; // 配置p2.2作为输入(复位后也总是输入) P2REN = BIT2; // 为p2.2启用上拉/下拉 P2OUT &= ~BIT2; // 为p2.2选择下拉电阻 就可以了, 哪位高手解释一下是什么原因呢,谢谢
单片机型号 msp430 g2553 ,这样设置对吗
27,521
社区成员
28,799
社区内容
加载中
试试用AI创作助手写篇文章吧



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
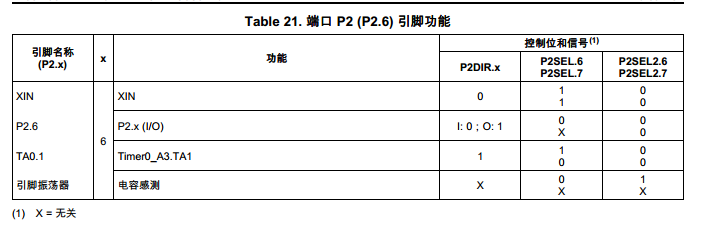 楼主,根据数据手册P2SEL2.7也得设置为0,你再查一下吧。
楼主,根据数据手册P2SEL2.7也得设置为0,你再查一下吧。