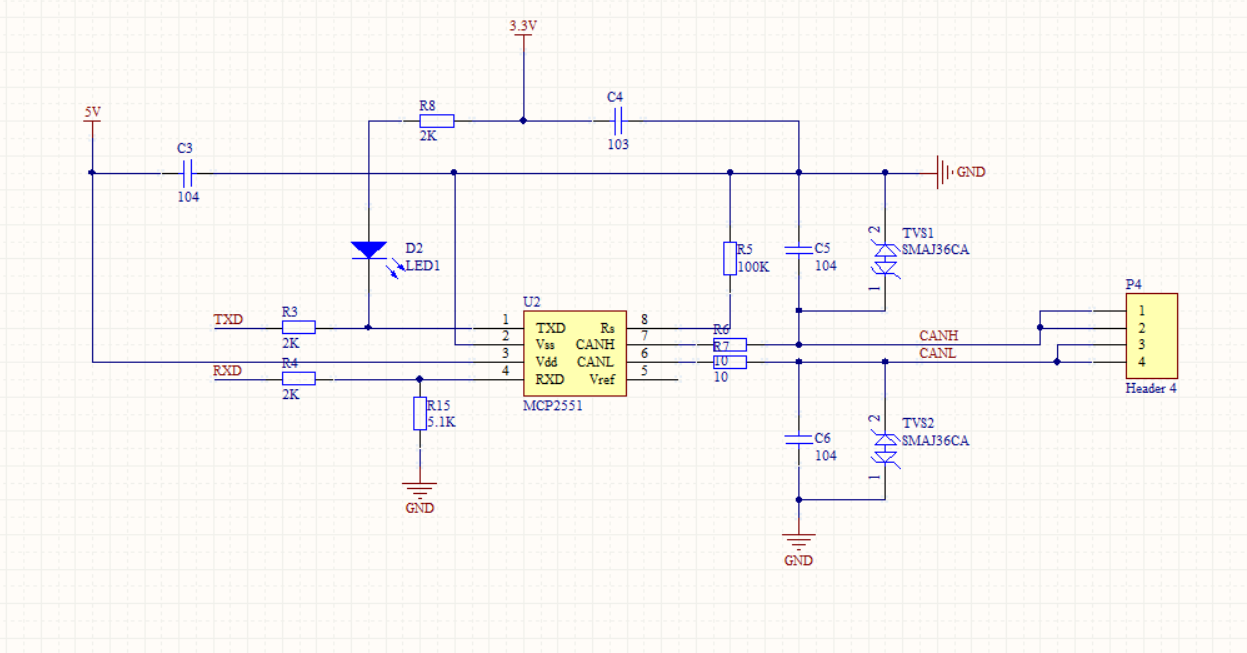
降低波特率 或去掉 C5 C6 试试看, 怀疑是容性负载太大了
楼主,你的CAN网络的起点和终点都在CANH和CANL之间加入120Ω的终端电阻了吗?
27,521
社区成员
28,799
社区内容
加载中
试试用AI创作助手写篇文章吧





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享