社区
GAME,图形处理/多媒体
帖子详情
硬件二值化的摄像头如何表示黑白块
weixin_43490926
2019-01-23 01:12:07
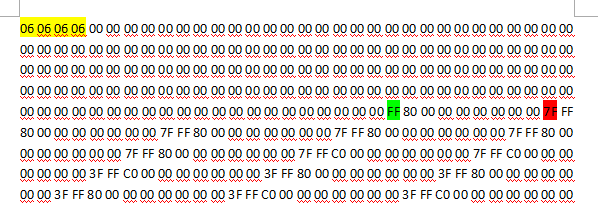
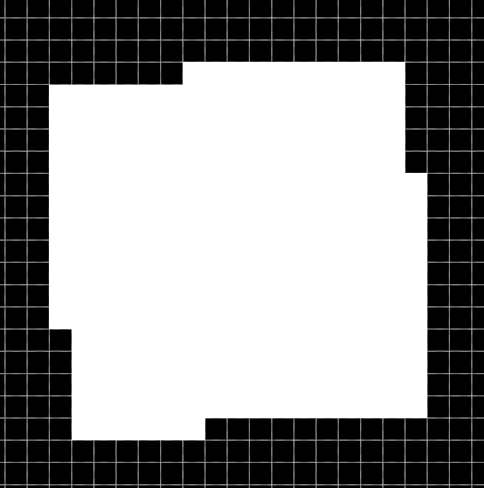
买了一块硬件二值化的摄像头,用串口接收了一下传来的数据,下图是数据,想问一下哪些地方表示白色方块?怎么判断?
...全文
900
6
打赏
收藏
硬件二值化的摄像头如何表示黑白块
买了一块硬件二值化的摄像头,用串口接收了一下传来的数据,下图是数据,想问一下哪些地方表示白色方块?怎么判断?
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
6 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
虎子8
2019-01-29
打赏
举报
回复
图片是什么格式的, 先转成bmp的。 TBitmap读取图片 Canvas.Pixels可以直接读取颜色。试下吧 二值化的话 0黑色 255白色
weixin_43977305
2019-01-25
打赏
举报
回复
應該可以猜一下: 1. 應該是二進制: ex: FF: 1111 1111, 7F: 0111 1111 2. 06060606 應該是 flag 或大小, 80 可能是換行 or 也是二進制的點 3. 像素點的方向, 可能是 左到右或右到左, 上到下or下到上, 可以猜看看
BlueStorm
2019-01-23
打赏
举报
回复
像这种提问,基本上就是叫人瞎猜。
bwsoft1
2019-01-23
打赏
举报
回复
数据是啥格式的,应该有说明的吧
日立奔腾浪潮微软松下联想
2019-01-23
打赏
举报
回复
因为二值化了,它可能用1bit代表一个像素
weixin_43490926
2019-01-23
打赏
举报
回复
这个是图像,如果1代表白块为什么图像和数据不吻合?
stm32ov7670
摄像头
实验
黑白
二值化
stm32旗舰版 ov7670
摄像头
实验
黑白
二值化
详细代码代码
C++实现调用
摄像头
并实时
二值化
一个简单的C++程序包含了对
摄像头
的调用以及实现对捕捉的图像实时
二值化
摄像头
二值化
.zip
ov2640
摄像头
二值化
程序,程序还可以定位白色背景下的黑色小球。
STM32F103驱动
二值化
摄像头
飞思卡尔赛车用的
二值化
摄像头
驱动,官方都使用高端的芯片驱动,而且用了DMA,复杂得很,这个程序只用了简单的中断就完成了数据的读取
OV2640
二值化
OV2640的
二值化
,原始图像为彩色,经过
二值化
,然后经过骨架化。
GAME,图形处理/多媒体
1,184
社区成员
14,330
社区内容
发帖
与我相关
我的任务
GAME,图形处理/多媒体
Delphi GAME,图形处理/多媒体
复制链接
扫一扫
分享
社区描述
Delphi GAME,图形处理/多媒体
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享