社区
Linux/Unix社区
帖子详情
ros 安装初始化环境变量问题
Matthew_DD
2019-03-21 09:08:44
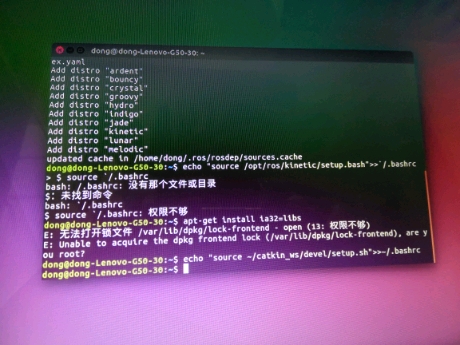
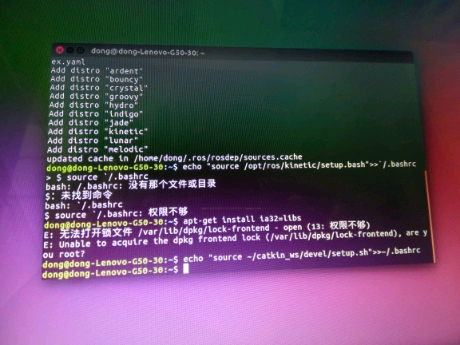
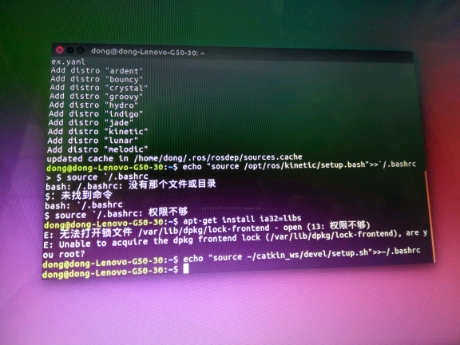
初始化环境变量出现这些问题,请教大神,搞了好久都不行。
...全文
383
2
打赏
收藏
ros 安装初始化环境变量问题
初始化环境变量出现这些问题,请教大神,搞了好久都不行。
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
梦龙回狼
2019-06-14
打赏
举报
回复
加个sudo 啊,权限不够。比如你的程序命令应该是sudo apt-get install ia32-libs
30climbing
2019-06-12
打赏
举报
回复
你可以去对应的地址看一下有没有那个 .bash文件。 你这个貌似是没有,如果没有的话就是ROS没有安装成功。
ROS
Kinetic
安装
过程以及Website may be down
问题
记录
关于
ROS
的
安装
,网上有很多比较详细的教程。最近在
安装
ROS
的过程中遇到一个Website may be down的
问题
。写这篇博客总结并记录一下。 1、
安装
过程 (1)添加源: $ sudo sh -c 'echo "deb http://packages.
ros
.org/
ros
/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/
ros
-latest.list' 或者来自中国的源: $ sudo sh -...
Ubuntu16.04
安装
ROS
中的一些
问题
关于
ros
init
初始化
失败以及
ros
dep update失败,主要是因为网络的
问题
,可以尝试使用多个不用的网络试一下,热点会有比无线更好的效果。
ros
core失败,当时由于网络
问题
ros
dep update失败了十几次后终于成功了,没想到source完之后
ros
core还是打不开,显示提示程序“
ros
core”尚未
安装
。 您可以使用以下命令
安装
:sudo apt install python...
Ubuntu
安装
ROS
Kinetic并启动小乌龟
操作系统版本:Ubuntu16.04
ROS
版本:Kinetic 1.首先在软件更新中切换源,选择中国服务器 2.在控制台中输入命令: $ sudo sh -c 'echo "deb http://packages.
ros
.org/
ros
/ubuntu $(lsb_release -sc) main" > ...
ubuntu20 & 16
ros
安装
踩坑记
添加下载源: sudo sh -c ‘echo “deb http://packages.
ros
.org/
ros
/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/
ros
-latest.list’ 设置密钥: sudo sh -c ‘echo “deb http://packages.
ros
.org/
ros
/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/
ros
.
Ubuntu20.04
安装
ROS
VMware Ubuntu20.04
安装
ROS
noetic
Linux/Unix社区
18,828
社区成员
11,491
社区内容
发帖
与我相关
我的任务
Linux/Unix社区
Linux/Unix社区 专题技术讨论区
复制链接
扫一扫
分享
社区描述
Linux/Unix社区 专题技术讨论区
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
