社区
单片机/工控
帖子详情
无人机光流定点
6岁就会跑
2019-04-01 03:40:13
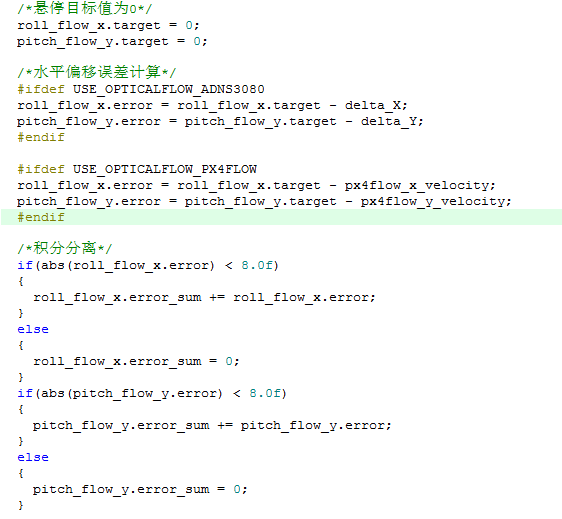
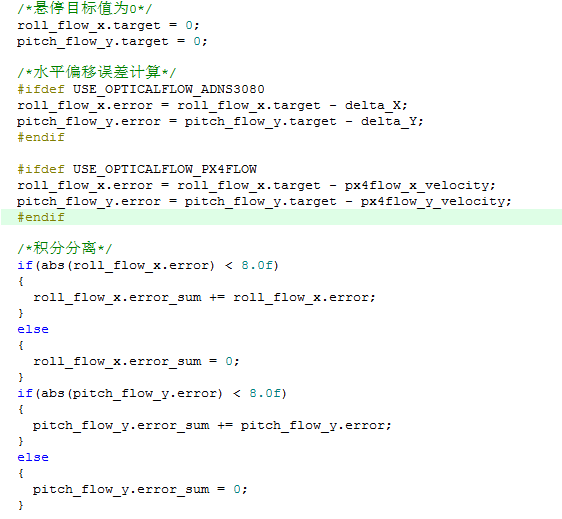
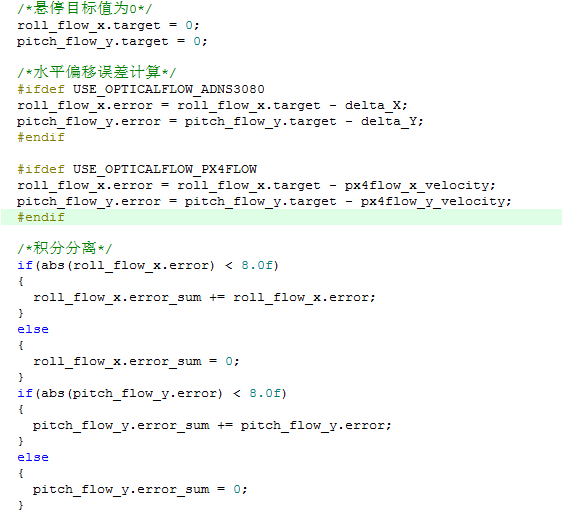
1. 分别计算x和y方向的速度误差(目标速度为0) 2. 累计误差(用于积分),累计误差需要限幅(误差无限累计后会造成溢出,导致积分环节出错。比如有符号数溢出,输出突变) 3. 计算PID output= p* error+ i* error_sum+d*( error- error_old); 4. 输出限幅(防止输出超过pwm的调节范围) 5. 保存当前误差 error_old =error 程序
...全文
222
回复
打赏
收藏
无人机光流定点
1. 分别计算x和y方向的速度误差(目标速度为0) 2. 累计误差(用于积分),累计误差需要限幅(误差无限累计后会造成溢出,导致积分环节出错。比如有符号数溢出,输出突变) 3. 计算PID output= p* error+ i* error_sum+d*( error- error_old); 4. 输出限幅(防止输出超过pwm的调节范围) 5. 保存当前误差 error_old =error 程序
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
LIGHT飞控代码-
光流
定点
(OpenMV串级PID).rar
TI飞控-
光流
定点
程序
STM32-270四旋翼
无人机
机载PM2.5+温度传感器采集监测环境数据毕业设计
本项目中
无人机
机载**PM2.5**和**温度传感器**,并将相关信息无线传送至**自研的LABVIEW
无人机
地面站**进行可视化显示与飞行调试。 STM32_270小四轴相对成本便宜,飞机有一定冗余负载能力,且飞控与遥控器源码开源,配合PV3953L1
光流
激光模块(PMW3901+VL53L1X),可实现室内低空稳定
定点
悬停,适合
无人机
二次开发和学习惯导、飞行控制等基本理论,多数本科毕业设计基于该平台都可以快速实现期望功能。
YOLOV8
无人机
海上搜救项目实战
本课程在YOLOV8最新大模型算法的基础上,
无人机
结合人工智能目标检测技术在海上救援中具有巨大的潜力,通过
无人机
摄像头视频对海上或江河进行实时人工智能识别,对‘船只’、‘机器人’、‘浮标’、‘救生衣’、‘陆地上的人’、‘水上的人‘等进而实现精准的动态目标识别,同时将检测图像和结果传给救援及管理中心,实时检测广泛覆盖范围、报警与响应,快速搜索与发现,准确目标识别,降低风险与协同作战,适应多种环境等。实现了海上或水上救援搜索平台的信息化、标准化、智能化。
无人机
通过人工智能目标检测在海上救援中可以迅速、准确地发现救援目标,提高了救援效率和成功率,同时也保障了救援人员的安全。
无人机
光流
定点
讲解
无人机
光流
定点
光流
是测速算法,并不是直接定位的。简单理解,
光流
就是通过检测图像中光点和暗点的移动,来判断图像中像素点相对于飞行器的移动速度。如果地面是静止的,自然就可以得到飞行器相对于地面的移动速度啦。所谓
光流
定位,其实是利用
光流
测速再积分定位而已啦。
无人机
做
光流
定点
算法需要注意一下几点: 1、飞机在不同高度
光流
传感器所能测到的像素点是不一样的,
无人机
距离地面低的时候对距离的感知比距离地面高的...
光流
定点
若干问题分析
1.
光流
摄像头移动速度快慢对结果的影响 实际测试发现,在一定高度水平慢速移动
光流
摄像头20个单位长度,
光流
累加值为6 - 9 Pixel,水平快速移动
光流
摄像头20个单位长度,
光流
累加值为50 - 60 Pixel。当飞机缓慢漂移时,
光流
摄像头感知不到或比较小,飞机不能及时进行位置控制。 2.飞机姿态倾斜补偿 当飞机姿态发生倾斜时,需要对
光流
的数据进行补偿,原理如下图所示:
单片机/工控
27,375
社区成员
28,769
社区内容
发帖
与我相关
我的任务
单片机/工控
硬件/嵌入开发 单片机/工控
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 单片机/工控
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享